
FIR Lab (Field and Industrial Robotics Laboratory) is the main experimental facility of the PRISMA Team devoted to design, development and testing of innovative robotic solutions. The lab is equipped with fast prototype machines, e.g. 3D printers and CNC, and several manipulation robots employed for research in field and industrial robotics.
Venue: Department of Electrical Engineering and Information Technology, University of Naples Federico II, bldg. 5/A, via Claudio 21, 80125 Naples




- Quadruped robot with 12 degrees of freedom
- Key dimensions: 930 mm of length, 530 mm of width, 800 mm of height
- 3-degree-of-freedom legs (2 DOF at the hip, 1 DOF at the knee)
- Compact and mechanically compliant ANYdrive actuators
- 50 kg of mass, up to 15 kg of carried payload
- 360° perception of the near environment and obstacles within 2 meters enabled by 6 depth cameras, 360° perception of obstacles within 100 meters enabled by the 3D LiDAR
- Two 8th gen Intel Core i7-based PCs for real-time locomotion and navigation functions
- Built in Wi-Fi module for communication with an external PC
- Swappable Li-ion battery, UN 38.3 certified 932.4 Wh, IP 67
- Capable of reaching speeds up to 1.3 m/s, to climb steps up to 250 mm, to cross gaps of up to 300 mm and to walk on slopes of up to ±30°

- Weight ~17.8 Kg
- Payload 3.0 kg
- Repeatability < ~0.1 mm
- Reach 855 mm
- Workspace efficiency 95%
- Degrees of Freedom 7 (all with torque sensors)
- Certifications ISO10218, ISO13849

- 7 kg payload
- 7-degrees-of-freedom robot
- In-line wrist variant
- Mounting flange DIN ISO 9409-1-A 50
- Any mounting position available
- 0.05 mm repeatability (ISO 9283)
- KR C2 lr controller
- 16 kg weight (excluding controller)

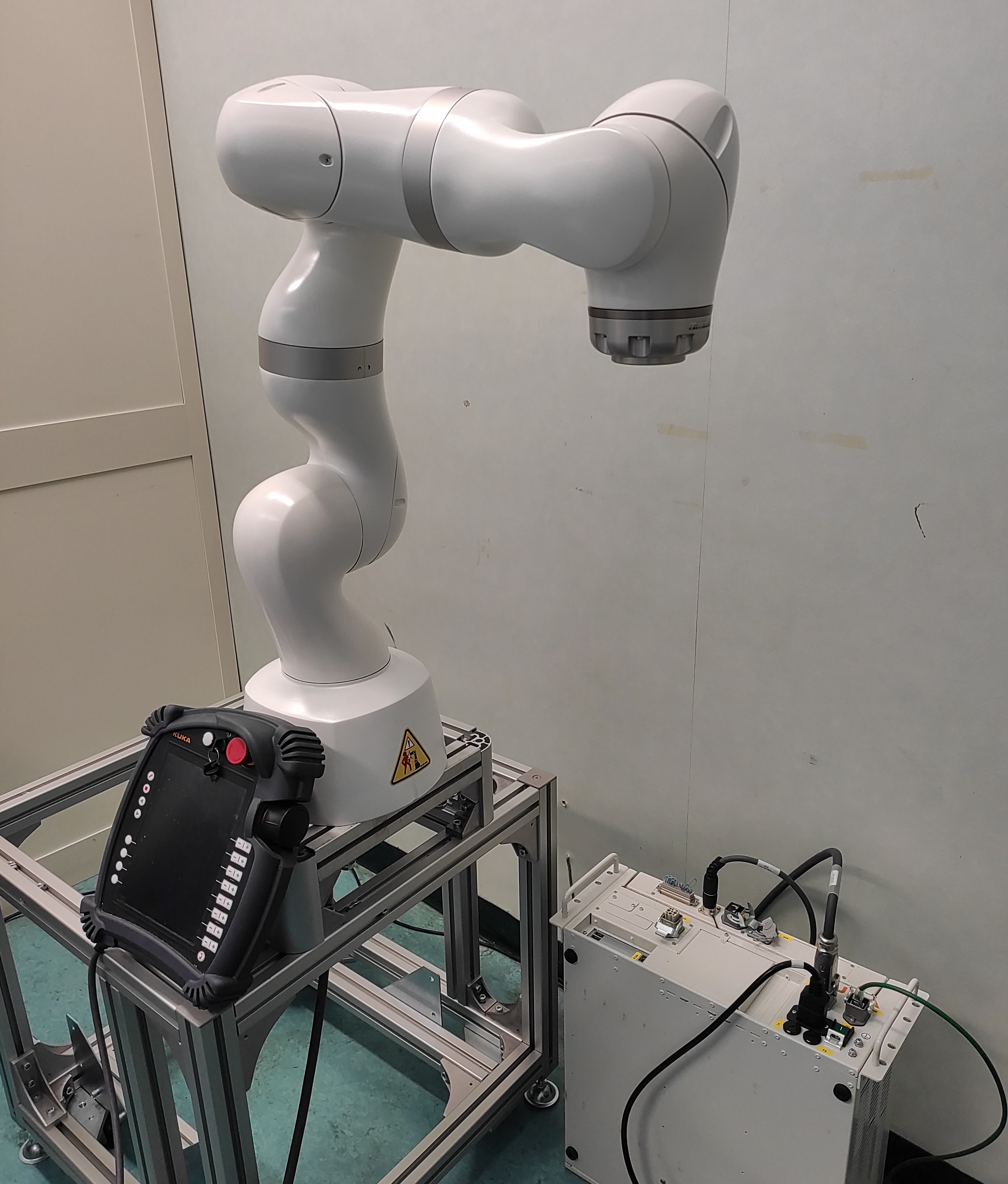
- 7 kg payload
- 7-degrees-of-freedom robot
- In-line wrist variant
- Mounting flange DIN ISO 9409-1-A 50
- 0.1 mm repeatability (ISO 9283)
- KUKA Sunrise Cabinet
- 22 kg weight (excluding controller)

- Humanoid-like 21-degree-of-freedom robot
- Omnidirectional mobile platform
- Two SCHUNK LWA 4P arms with 6 degree of freedoms each
- 7th degree of freedom provided by SCHUNK PRL-100 integrated into shoulder
- Two motors actuating torso and one motor for pan-tilt neck
- QNX-based PC for real-time and low-level control of motors and implementation of safety procedures
- Linux-based PC used for perception and high-level planning and control algorithms

- Anthropomorphic structure 1:1 ratio to the human hand
- 20 joints and 9 degrees of freedom
- Low energy consumption at 24 V DC
- Integration of control, regulator and power electronics in the wrist/li>
- ROS driver available
- RS-485 interface
- Easy connection with market-standard industrial and lightweight robots
- 1.3 kg weight

- Humanoid robot with 27 degrees of freedom
- Key dimensions: 1788mm × 510mm × 287mm
- 7-degree-of-freedom arms (each arm with 3 DOF at the shoulder, 1 DOF at the elbow, 3 DOF at the wrist)
- 6-degree-of-freedom legs (each leg with 3 DOF at the hip, 1 DOF at the knee, 2 DOF at the ankle)
- High-torque motors delivering up to 120 N·m for arms and 360 N·m for legs
- 360° perception enabled by 3D LiDAR and depth camera
- Intel Core i5-based PC for real-time platform functions
- Optional Nvidia Jetson Orin NX for advanced user development
- 15 Ah (0.864 kWh) battery with a maximum voltage of 67.2 V
- Permanent magnet synchronous motors (PMSM) with high-speed, low-inertia design
- Industrial-grade cross roller bearings for precision and load handling
- Capable of reaching speeds up to 2 m/s

- MTx inertial and magnetic measurement units
- 3D gyroscopes, 3D accelerometers, and 3D magnetometers
- Body worn sensors on shoulders, sternum, head, arm, forearm, and hand
- Two Xbus Masters handle the wireless communication with the PC and synchronize all sensor
- Real-time frequency of maximum sampling rate of 120Hz
- MVN Studio Software
- 1.9 kg weight
FLARE (FLying AREna) is the lab of PRISMA Team devoted to aerial robotics tests. The facility is an 8x6x6 meter flight cage equipped with an OptiTrack motion acquisition system, consisting of 20 cameras, to recognize and measure the location of aerial vehicles and objects inside the arena with an accuracy of 1 mm at 200 Hz. Several multirotor drones of different size and weight are employed for aerial robotic manipulation on mock-ups of inspection and maintenance scenarios.
Venue: San Giovanni a Teduccio Complex, University of Naples Federico II, bldg. I3, gate 9, corso Nicolangelo Protopisani 70, 80146 Naples



- Drone frame x6 configuration
- 10 kg payload
- 50 min autonomy
- Range 10 km
- Class 158 cm
- 35 km/h speed (typical) / 65 km/h (maximum)
- Wind resistance level up to 13 m/s
- 50 mm / 24 h rain-proof
- -40–60 °C temperature-proof
- Compliant with military IPC3 standards
- Compliant with European DO-178 aviation standards

- Drone frame x8 configuration
- 3 kg payload
- 5-degree-of-freedom robot arm
- Battery 1-degree-of-freedom position control
- Class 85 cm

- Drone frame x8 configuration
- 5 kg payload
- 5-degree-of-freedom robot arm
- Battery 1-degree-of-freedom position control
- Class 100 cm
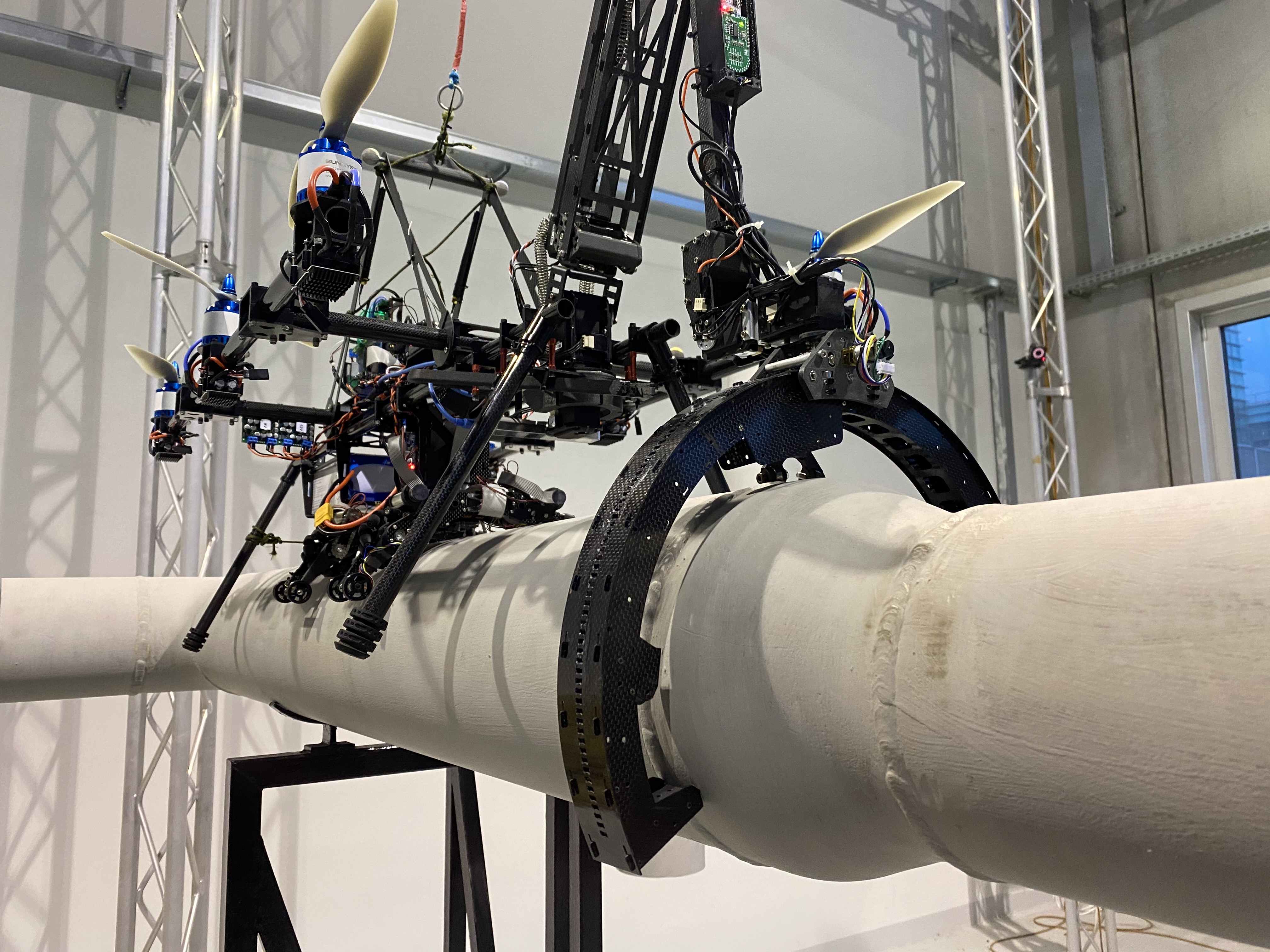
- Hexacopter drone frame in linear configuration
- 5 kg payload
- 6-degree-of-freedom robot arm
- Battery 1-degree-of-freedom position control
- Class 80 cm
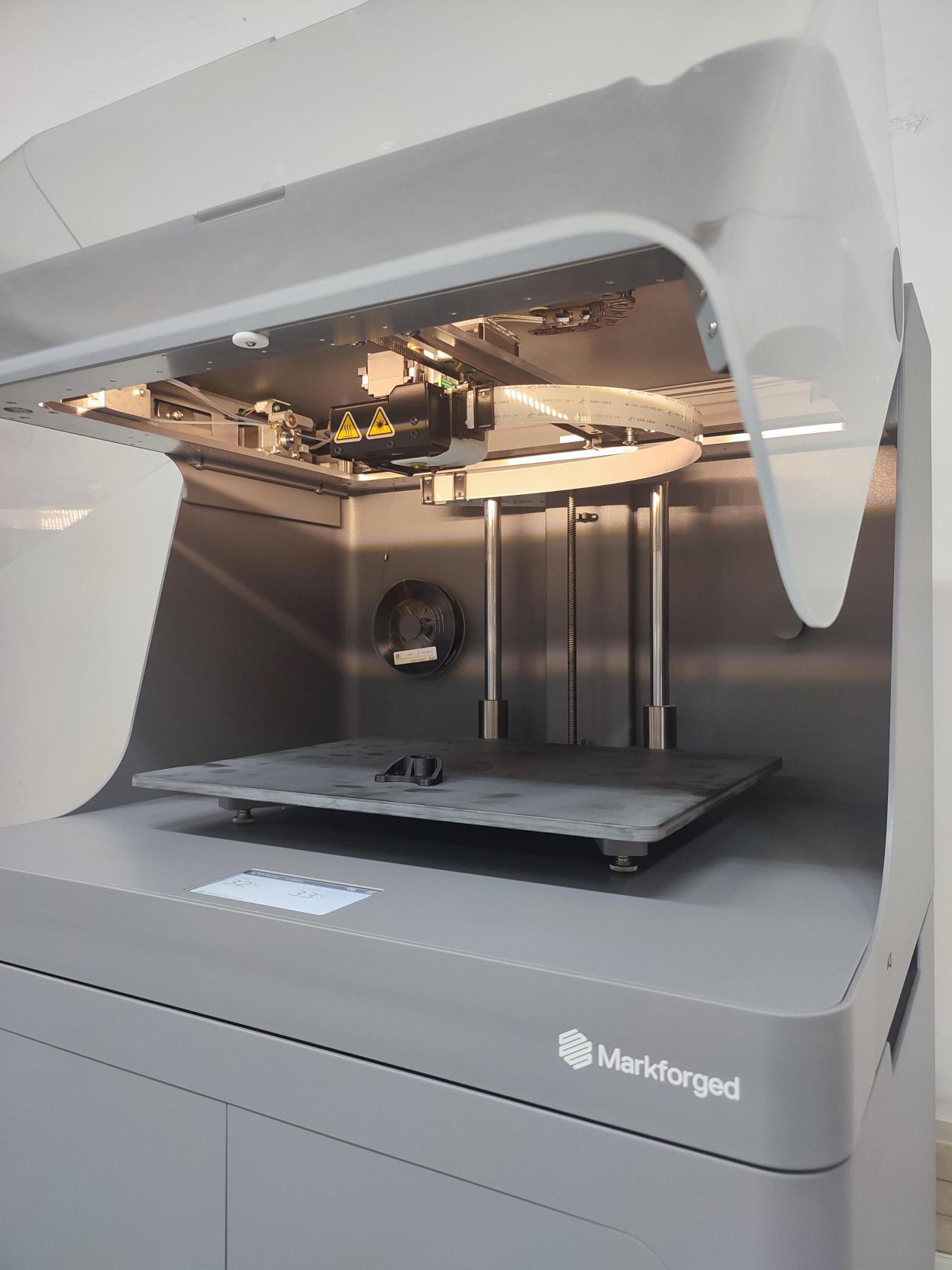
B2R Lab (Biomimetic and Biohybrid Robotics Laboratory) is the new facility of the PRISMA Team for the design and fabrication of soft and bioinspired robots aimed at medical applications, prostheses and exoskeletons as well as their biological interfaces to communicate with the human body. The lab is equipped with lower/upper limb prostheses and exoskeletons, both commercial robots and internally developed prototypes. The Lab has optical tracking systems, emg sensors, treadmills, and in general rehabilitation systems, 3D printers in metal, silicone and polymeric material, as well as tools for rapid prototyping of soft robots.
Venue: Polytechnic and Basic Sciences School, University of Naples Federico II, piazzale Tecchio 80, 80125 Naples



- One-of-a-kind 3D printer
- Quick-change toolhead technology
- Wide range of materials using different processes: filaments (thermoplastics) and liquids (silicones) in high quality
- Open technology
- High-temperature printing supported
- Large print volumes
- 3D printing with carbon fiber reinforced components
- Laser scanning with micron precision for calibration
- Dimensional accuracy verification with Blacksmith adaptive manufacturing technology
- Part production acceleration with Turbo Print, the fastest printing mode from Markforged

- 3D printed
- 16 degrees of mobility
- 2 motors
- Tendon actuation
- Arduino UNO microcontroller
- 336 weight (excluding controller)

- 6 cameras for high-speed tracking of bodies and objects in 6 DoFs
- Ability to send real-time movements to third-party software via proprietary or standard protocols such as VRPN, TrackD
- Integrable with various systems, such as EMG sensors

- 3D printed
- 18 degrees of mobility
- 3 motors
- Tendon actuation
- Motor position sensors
- Tactile sensors at the fingertips
- Arduino UNO microcontroller
- 336 g weight (excluding controller)
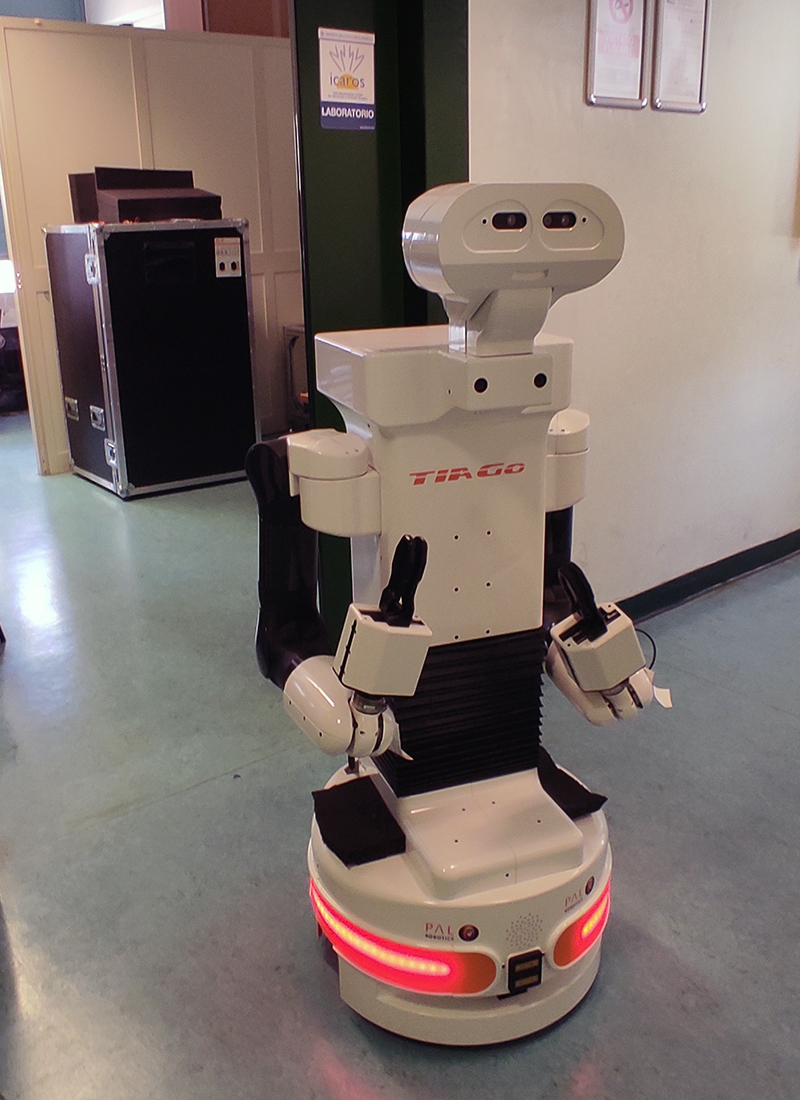
- Bimanual mobile robotic platform
- Mobile base with differential drive, max speed 1 m/s
- 7-degree-of-freedom arms, 1-degree-of-freedom torso lift, 2-degree-of-freedom head
- RGB-D camera, 6-DoF IMU, 10 m laser, 3 x 1m sonar
- 2 x 5W audio speakers, 2-microphone array with stereo output
- CPU Intel i7, 16 GB RAM, 500 GB SSD
- 2 36V 20 Ah batteries
- 802.11 n/ac 2x2 Dual Band Wi-Fi, Bluetooth 4.0
- Navigation and SLAM, manipulation, perception, speech recognition, human-robot interaction
SUR Lab (Surgical Robotics Laboratory) is the experimental facility of the PRISMA Team devoted to surgical robotics. The lab is equipped with a da Vinci Research Kit and several collaborative robots employed for research in interventional and surgical robotics. Cameras, EMG sensor kit and haptic interfaces are also available.
Venue: ICAROS Center, Polyclinic University of Naples Federico II, bldg. 5, via Pansini 5, 80131 Naples


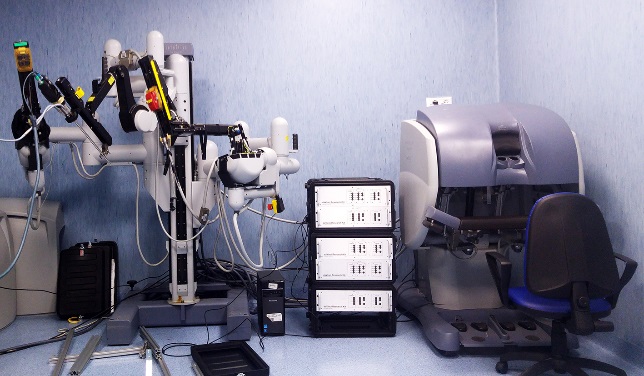
- Open research platform based on da Vinci System by Intuitive Surgical
- Surgeon's console with two Master Tool Manipulators (MTMs)
- MTM 8-degree-of-freedom robot
- Patient's end with two Patient Side Manipulators (PSMs)
- PSM 7-degree-of-freedom robot
- PSMs teleoperated by MTMs with coordinated foot-pedal movements

- Robot for transanal prostate biopsy
- 3 kg payload
- 4 active degrees of freedom
- 2 passive degrees of freedom
- Soft wrist
- Mounting MicrUs Telemed ultrasound probe
- 15 kg weight (excluding controller)
- Medical version of KUKA IIWA
- 7 kg payload
- 7-degree-of-freedom robot
- In-line wrist variant
- Mounting flange DIN ISO 9409-1-A 50
- 0.1 mm repeatability (ISO 9283)
- KUKA Sunrise cabinet
- 22 kg weight (excluding controller)