
Immagini di riferimento
Oggetto della tesi
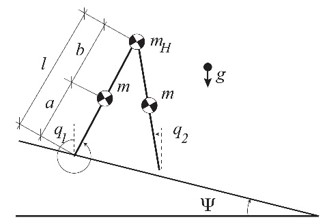
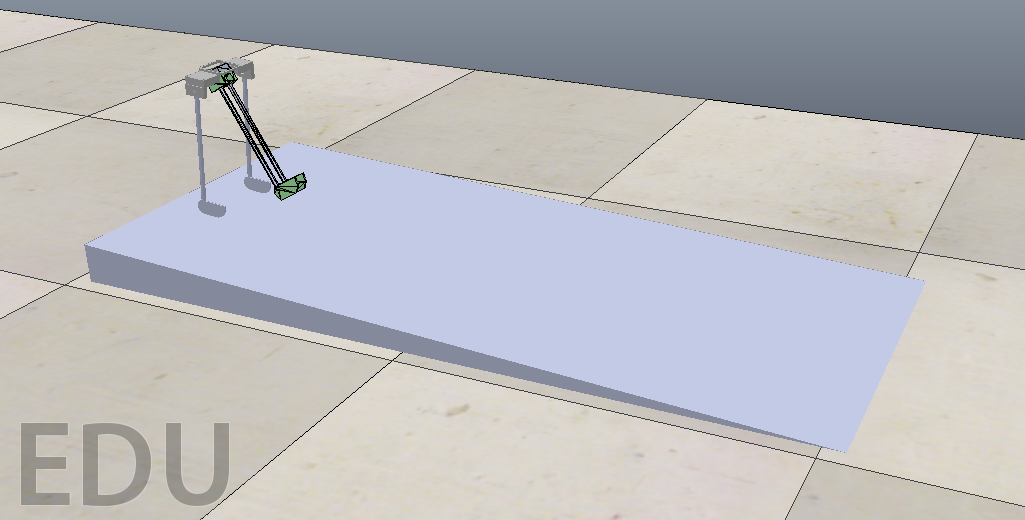
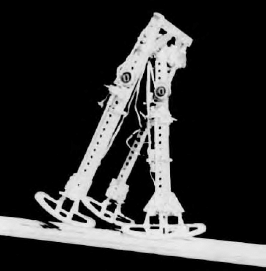
L'obiettivo finale è arrivare alla costruzione di un prototipo sperimentale di robot bipede di ridotte dimensioni attuato da motori elettrici. La prima fase sarà la progettazione meccanica del prototipo, seguita dall'analisi in un simulatore con motore fisico (es.: Gazebo). Successivamente, si procederà alla stampa dei pezzi necessari tramite stampante 3D, e all'assemblaggio dei componenti elettronici e meccanici. La fase di testing ed interfacciamento è propedeutica ai test di controllo da effettuare sulla piattaforma.
La tesi può esser affrontata e portata a termine a vari livelli, soprattutto se affrontata da tesisti triennali.
Strumenti e software/hardware
Matlab/Simulink, Gazebo/CoppelliaSim, Stampante 3D, Motori elettrici
Docente di riferimento
Fabio Ruggiero - fabio(dot)ruggiero(at)unina(dot)it