
Immagini di riferimento

Oggetto della tesi
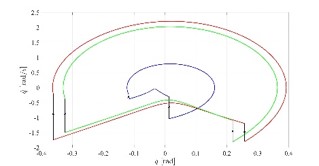
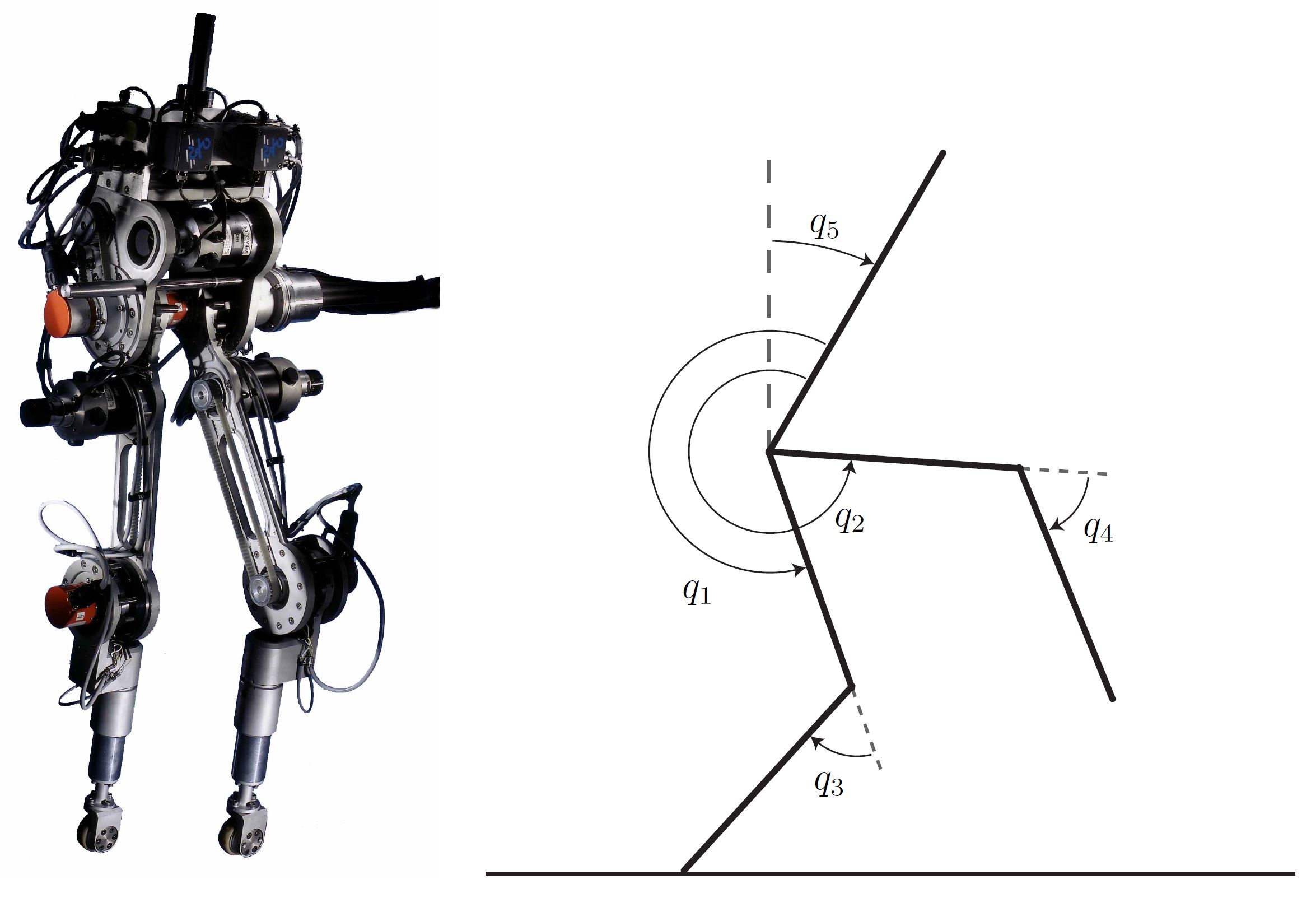
L'obiettivo del lavoro di tesi è progettare tecniche di controllo per stabilizzare la camminata di un robot bipede su una soluzione periodica di riferimento rappresentata, nel suo spazio di stato, da un ciclo limite. Tali algoritmi di controllo dovranno tenere conto degli impatti che avvengono durante la camminata, ovvero dovranno considerare un modello ibrido della dinamica del bipede. Il concetto di dinamica-zero ibrida può essere efficacemente impiegato come base di partenza per garantire la stabilità di una data orbita periodica anche in presenza di impatti. Gli approcci di controllo impiegati saranno prevalentemente di tipo energetico, volti a garantire la passività del sistema a ciclo chiuso. Lo schema di controllo verrà sviluppato tramite il software Mathematica, testato in Matlab/Simulink ed eventualmente validato in ambiente di simulazione dinamica. In tal caso, lo studente potrebbe anche occuparsi della progettazione CAD del bipede.
Strumenti
Matlab/Simulink, Mathematica, C++, V-Rep, Gazebo, Catia
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.