
Immagini di riferimento

Oggetto della tesi
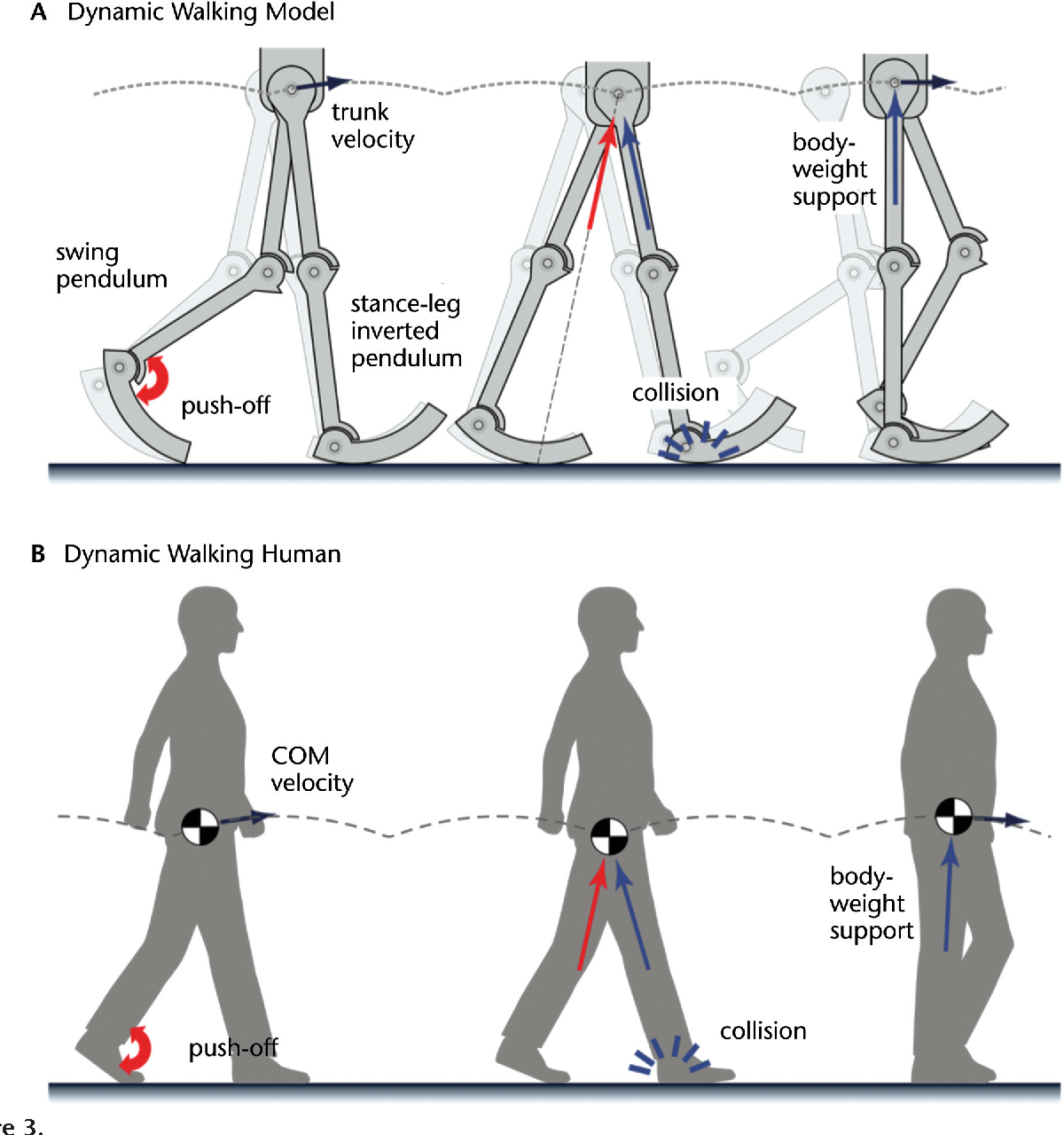
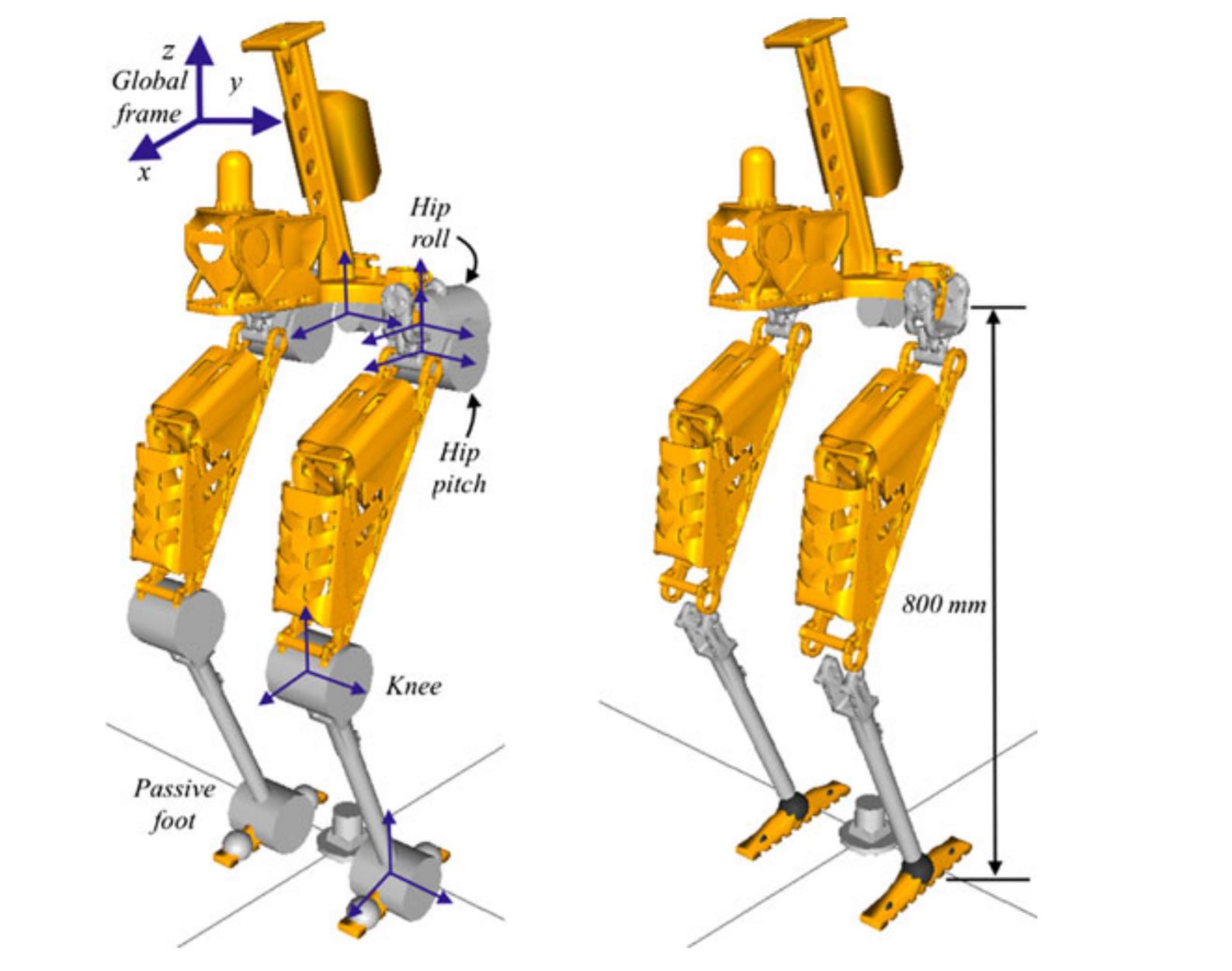
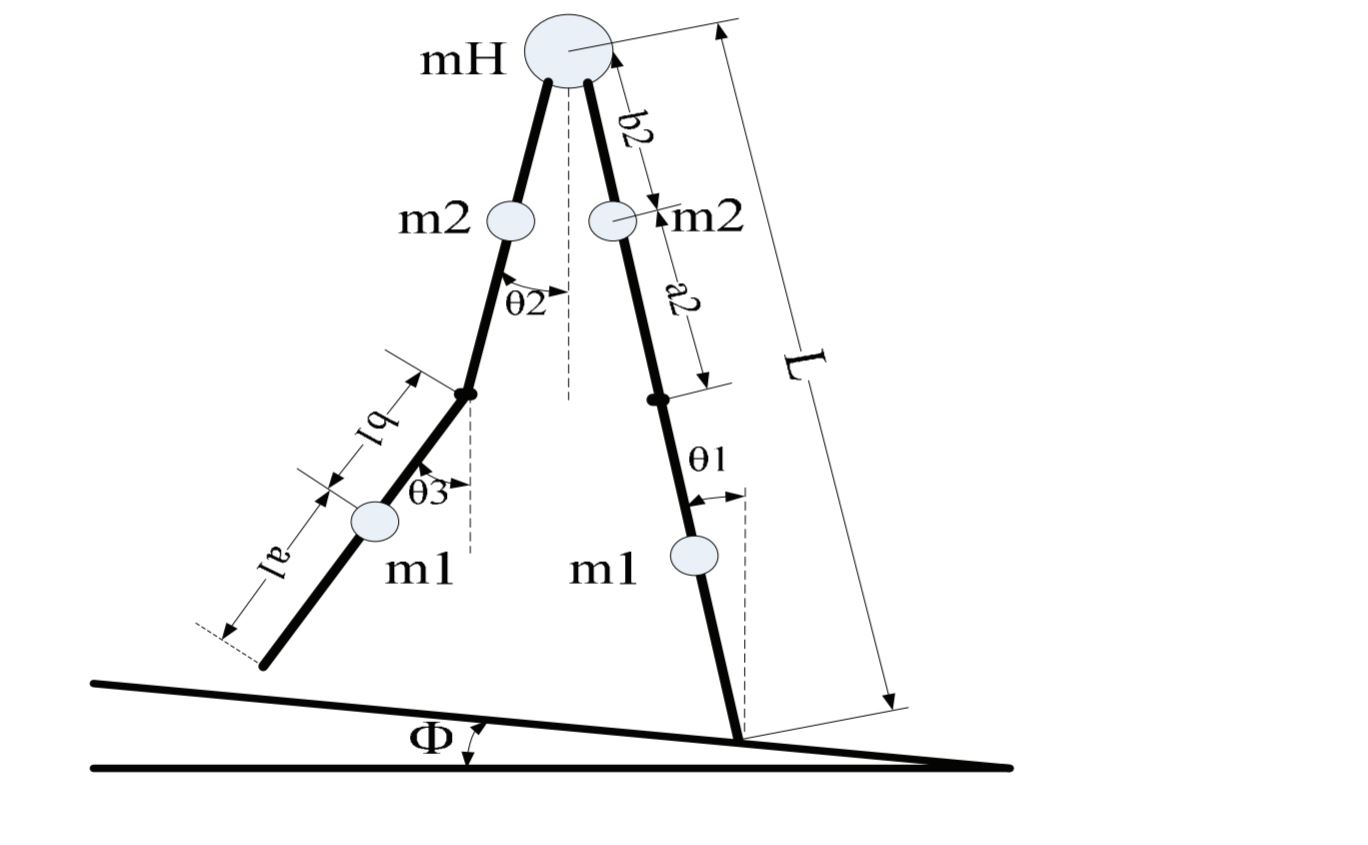
L'obiettivo del lavoro di tesi è progettare tecniche di controllo basate su approccio energetico per la generazione di camminate periodiche nell'ambito della locomozione bipede passiva. Il design delle tecniche di controllo dovrà mirare all’alterazione dei parametri fisici del robot al fine di ottenere andature differenti dalla camminata passiva naturalmente esibita dal bipede. Inoltre, dovranno essere sviluppate strategie di controllo atte ad estendere la camminata a piani con inclinazione arbitraria. Le tecniche di controllo dovranno essere sviluppate per bipedi che presentino almeno tre gradi di libertà per gamba (anca, ginocchio, caviglia, ...) più un eventuale grado di libertà per il torso e dovranno esser in grado di minimizzare il dispendio energetico associato alla camminata, aumentandone, al contempo, la robustezza nei confronti di incertezze parametriche e di disturbi esogeni. Lo schema di controllo basato su approccio energetico verrà sviluppato tramite il software Mathematica, testato in Matlab/Simulink ed eventualmente validato in ambiente di simulazione dinamica. In tal caso, lo studente dovrà occuparsi della progettazione CAD del bipede.
Strumenti
Matlab/Simulink, Mathematica, C++, V-Rep, Gazebo, Catia
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.