
Immagini di riferimento

Oggetto della tesi
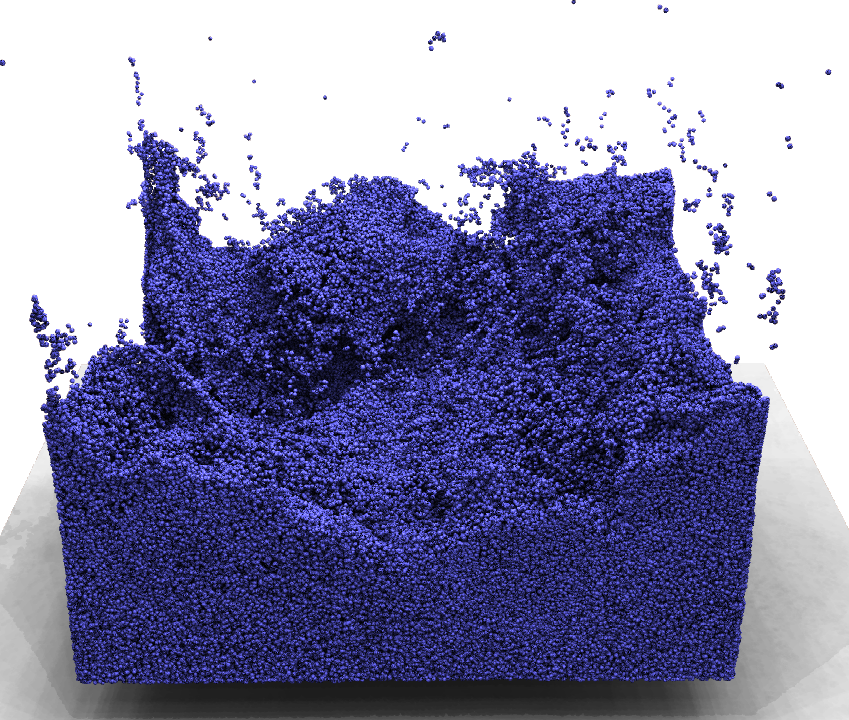
L'obiettivo del lavoro di tesi è progettare tecniche di controllo (lineari o non a seconda dei casi) per poter manipolare un oggetto deformabile in maniera non prensile. Dapprima si determinerà il modello matematico da utilizzare, basato ad esempio su di una rete di masse-molle-smorzatori, oppure tramite SPH (Smoothed-particle hydrodynamics). Successivamente si individueranno possibili tecniche di controllo per manipolare in maniera non prensile tali oggetti, ad esempio sfruttando le tecniche usate nello studio di reti complesse.
Strumenti e software
Matlab/Simulink, V-rep, C++
Docente di riferimento
Fabio Ruggiero - fabio(dot)ruggiero(at)unina(dot)it
Nike Air VaporMax 2019