
Immagini di riferimento


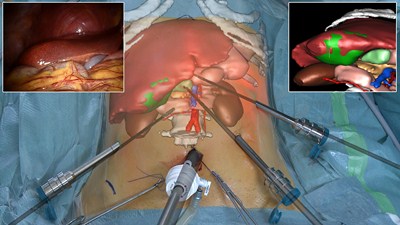
Oggetto della tesi
Lo svolgimento di tesi può riguardare lo sviluppo di uno o più dei seguenti punti:
- Studio dello stato dell’arte sull’utilizzo della realtà aumentata in ambito chirurgico
- Sviluppo di un ambiente interattivo integrato nello stereo-monitor della consolle del robot Da Vinci per la proiezione di informazioni aggiuntive
- Ricostruzione della forza utilizzando la visione e il modello fisico degli organi
- Realizzazione di feedback di forza utilizzando scala colorimetrica e/o vettori orientati per restituire al chirurgo informazioni della forza di contatto tra i tool e gli organi durante l’operazione, e/o lo stress del filo durante una generica operazione di sutura
- Controllo dell'endoscopio del robot da Vinci guidato da eye-tracking del chirurgo
Strumenti e software
Programmazione in ambiente linux/ros, da Vinci robot, visione computazionale, simulatori di oggetti deformabili (Sofa)
Docente di riferimento
Luigi Villani - luigi(dot)villani(at)unina(dot)it