
Immagini di riferimento


Oggetto della tesi
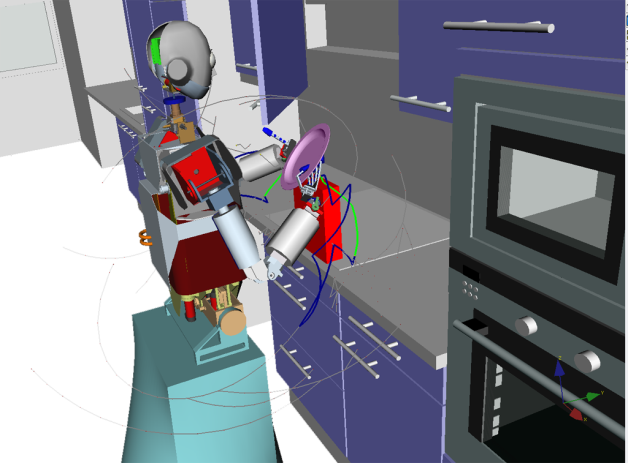
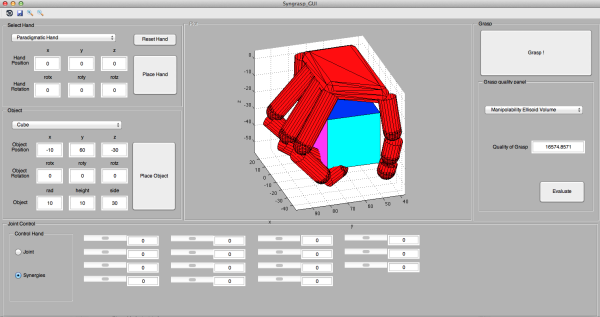
Il lavoro di tesi consiste nell’importare la cinematica del braccio KUKA LWR e della mano SCHUNK in un simulatore dinamico (Opengrasp, Simox, V-REP) in cui sia possibile rappresentare anche le forze di interazione con l’ambiente (forze di contatto scambiate tra mano e oggetto). Il simulatore deve girare su un sistema operativo real-time per consentire l’integrazione con hardware (KUKA-SCHUNK) e sensori (KINECT). Inoltre, la tesi prevede la realizzazione di un modulo di interfacciamento con ROS. Il simulatore dovrà anche interfacciarsi con MATLAB per poter testare strategie di pianificazione e controllo della presa e manipolazione di oggetti prima di destinare le applicazioni a un sistema reale.
Strumenti e software
SCHUNK Hand, KUKA LWR Arm, Open source Simulators, ROS, RTAI Linux, MATLAB
Docente di riferimento
Bruno Siciliano - bruno(dot)siciliano(at)unina(dot)it
Nike Zoom Vomero 11