
Immagini di riferimento

Oggetto della tesi
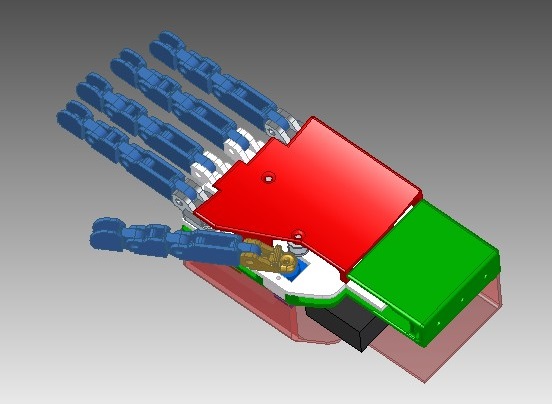
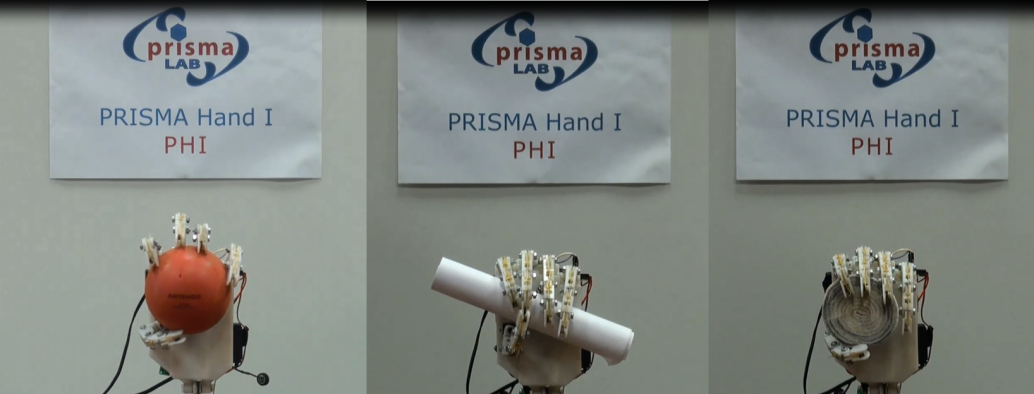
Il lavoro di tesi prevede lo studio di cinematiche di mani artificiali e meccanismi di trasmissione del moto con l’obiettivo di implementare meccanicamente sinergie di movimento. L’obiettivo è quello di ridurre i motori a vantaggio di un progetto meccanico più snello e leggero con relativa semplificazione del controllo. Il progetto meccanico deve mirare a un buon compromesso tra antropomorfismo e semplicità di implementazione meccanica delle sinergie. È richiesta una analisi della fattibilità con strumenti CAD, e analisi della presa con strumenti di simulazione che contengano librerie dedicate alla misura della qualità della presa. I prototipi di mano saranno realizzati con stampante 3D e i motori saranno controllati da microcontrollore Arduino. Il lavoro, inoltre, prevede la sensorizzazione della mano utilizzando sensori tattili per regolare le forze di contatto o in alternativa sensori di corrente ai motori.
Strumenti e software
Arduino, Stampante 3D, Software CAD, Conoscenze di Meccatronica
Docente di riferimento
Bruno Siciliano - bruno(dot)siciliano(at)unina(dot)it