
Immagini di riferimento
Oggetto della tesi
L’obiettivo del lavoro di tesi è la realizzazione di un algoritmo di reinforcement learning per la locomozione di un robot su gambe in ambienti dissestati. La prima fase della tesi si concentrerà sulla definizione delle caratteristiche principali dell’algoritmo come l’ambiente in cui effettuare l’addestramento, la policy da utilizzare e la funzione di reward. Una seconda fase della tesi riguarderà l’addestramento del robot all’interno dell’ambiente di simulazione utilizzato. Sarà quindi effettuata una campagna estensiva di simulazioni con variazioni randomiche di alcuni parametri dell’ambiente. La terza fase porterà alla verifica della validità dell’algoritmo e delle simulazioni effettuate, e si differenzierà in base alla struttura scelta su cui lavorare:
-
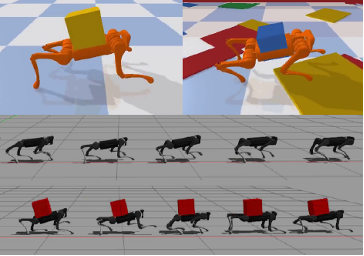
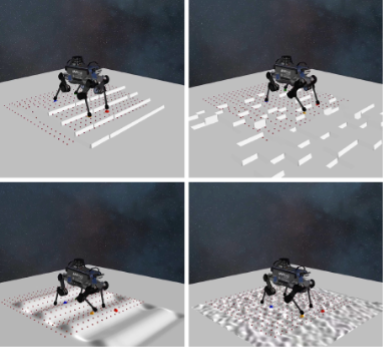
Sim-to-Sim. in caso di scelta del robot quadrupede. L’algoritmo sarà validato in simulazione utilizzando ambienti dissestati ignoti al robot, variando lo stato del robot stesso (ad esempio legando un peso variabile sul suo torso) o modificando in modo inatteso il coefficiente di attrito del suolo.
-
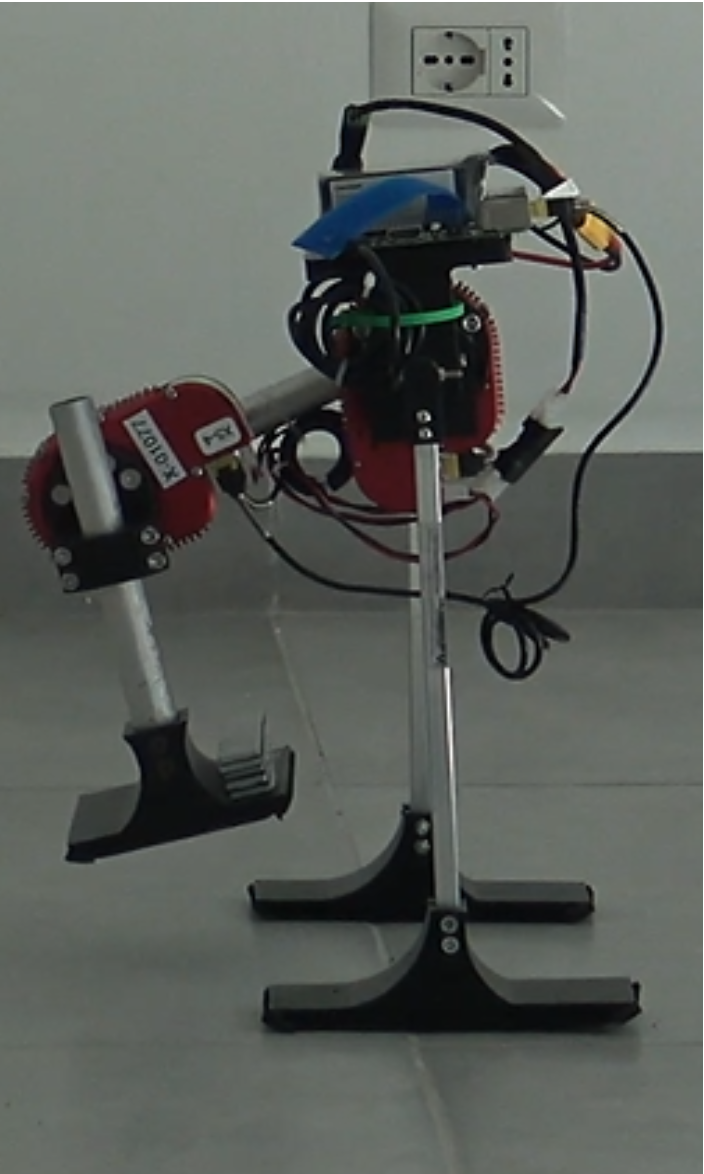
Sim-to-Real. In questo caso si potrà utilizzare il PRISMA Walker, robot bipede realizzato al PRISMA Lab. Questa scelta prevede una fase preliminare di importazione del CAD del robot nell’ambiente di simulazione, la definizione della cinematica e della dinamica del robot. Successivamente, l’algoritmo sarà validato nel reale utilizzando il robot.
Strumenti
RaiSim/MuJoco, raisimGymTorch, Ros, C++, PRISMA Walker
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.