
Immagini di riferimento

Oggetto della tesi
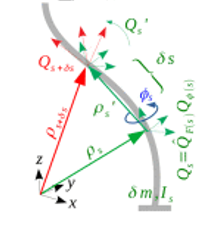
Il robot a tubi concentrici (CTR) è composto da più tubi elastici precurvati annidati concentricamente (vedi Fig. 1). Traslando e ruotando indipendentemente questi tubi, i CTR possono ottenere forme 3D lisce e agili, rendendoli interessanti per interventi chirurgici mininvasivi [1]. Il controllo accurato del CTR si basa sulla conoscenza in tempo reale della sua forma e della posizione della punta, che può essere ottenuta tramite modelli cinematici/dinamici. La teoria delle aste di Cosserat [2] funge da framework di riferimento per la modellazione di questi robot sotto carico. Tuttavia, i modelli completi di Cosserat-aste richiedono la risoluzione di un problema al contorno computazionalmente costoso, inoltre le ipotesi di interazione del tubo senza attrito e isteresi trascurabile omettono effetti non lineari critici, minando così l'accuratezza e la velocità richieste nel controllo in tempo reale [3].
L’obiettivo della tesi è quello di sviluppare un modello cinematico in tempo reale, veloce e accurato per un robot a tubo concentrico, fondendo la modellazione basata sulla fisica (ad esempio, formulazioni a curvatura costante [4] o di ordine ridotto [5]) con l'apprendimento residuo basato sui dati: il nucleo analitico calcola le previsioni di forma dalle rotazioni e dalle traslazioni del tubo, mentre una piccola rete neurale corregge gli errori residui da attrito, accoppiamento di torsione e tolleranze di fabbricazione.
Per l'addestramento e la convalida è possibile utilizzare un set di dati esistente, misurato su una piattaforma CTR reale e disponibile su [6]. Lo sviluppo iniziale del modello e il benchmarking saranno effettuati nel simulatore SOFA; una volta che gli algoritmi raggiungeranno gli obiettivi prestazionali nella simulazione, verranno implementati e testati sull'hardware fisico del robot.
[1]: H. Alfalahi et al. "Concentric Tube Robots for Minimally Invasive Surgery: Current Applications and Future Opportunities" IEEE Transactions on Medical Robotics and Bionics 2020
[2]: D.C. Rucker et al., “A Geometrically Exact Model for Externally Loaded Concentric Tube Robots”, IEEE Transaction on Robotics 2010
[3]: Z. Mitros et al. "From Theoretical Work to Clinical Translation: Progress in Concentric Tube Robots" Annual Review of Control, Robotics, and Autonomous Systems 2022
[4]: PE. Dupont et al., “Design and Control of Concentric Tube Robot”, IEEE Transaction on Robotics 2009
[5]: SM. Hadi Sadati et al., “Real-Time Dynamics of Concentric Tube Robots With Reduced-Order Kinematics Based on Shape Interpolation”, IEEE Robotics and Automation Letters 2022
[6]: https://github.com/ContinuumRoboticsLab/CRL-Dataset-CTCR-Pose
[7]: https://www.sofa-framework.org/applications/plugins/cosserat-beam-cable-needle/
Strumenti
Tools required: SOFA7, C++/Python, ROS
Docenti di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.