
Immagini di riferimento
Oggetto della tesi
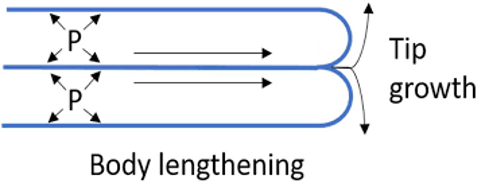
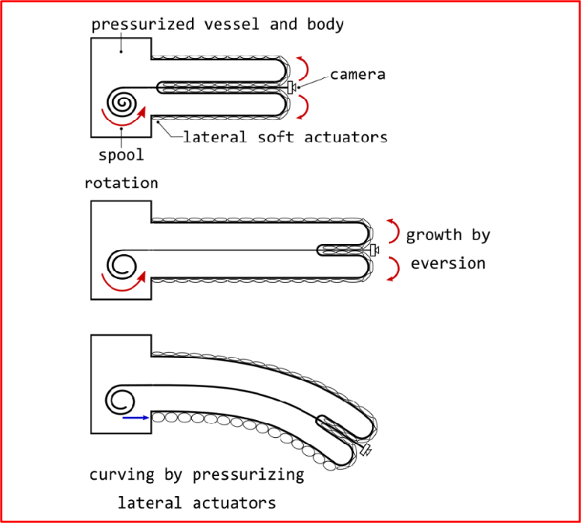
In questo progetto, sarà condotto uno studio completo su un robot soft ad eversione utilizzando attuazione pneumatica che può cambiare la sua lunghezza e curvatura per seguire una traiettoria predefinita. Lo studio avrà due fasi; nella prima fase, verrà sviluppato, simulato e controllato un progetto in simulazione. Nella seconda fase, potrebbe essere realizzato anche un prototipo (basato sui progressi dello studente). Tutto lo studio sarà condotto in collaborazione con medici per definire le specifiche e le caratteristiche dell'ambiente di navigazione.
Su questo lavoro di tesi è possibile stabilire collaborazioni con Università di Torino (Dott. Alberto Arezzo), INRIA, Francia (Dr. Cristian Duriez) e Queen Mary University of London, UK (Prof. Kaspar Althoefer).
Strumenti
Sofa simulation environment, Solidworks , Matlab, Simulink
Docenti di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.