
Immagini di riferimento




Oggetto della tesi
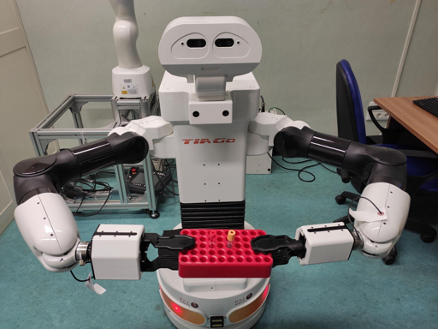
L’obiettivo della tesi consiste nello sviluppo di un sistema di controllo di un robot antropomorfo per la manipolazione bimanuale in compiti di assistenza in ambito domestico o ospedaliero. Il controllo sfrutta informazioni di forza e visione e sarà integrato con tecniche di apprendimento per migliorare l’efficienza e l’autonomia.
Lo studio di tesi potrebbe riguardare diversi aspetti del problema:
- L’utilizzo di tecniche di apprendimento per imparare compiti di manipolazione dall’uomo, in particolare le capacità di presa, di manipolazione e di gestione di task multipli.
- Lo sviluppo di una strategia di controllo che a partire dalle primitive di moto apprese e dalle informazioni di forza e visione gestisca dinamicamente la priorità tra task multipli.
- Lo sviluppo di tecniche di apprendimento per rinforzo saranno investigate per compiti di grasping e manipolazione. Saranno adottate tecniche di riduzione delle dimensioni dello spazio delle configurazioni del sistema robotico (sinergie di movimento) al fine di ottimizzare l’apprendimento di nuovi compiti. È necessario l’utilizzo di un sensore di visione di alto livello per riconoscimento oggetto e sensori di forza per il controllo della presa.
- Lo sviluppo di tecniche di controllo condiviso in cui l’uomo e la macchina condividono il compito e cooperano per la sua esecuzione con livelli di autonomia variabile sulla base dello stato del task.
Strumenti
Tiago++, KINECT, reti neurali, reinforcement learning, machine learning, Open CV, Xsense Motion Capture System, ROS, C++
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.