
Immagini di riferimento
Oggetto della tesi
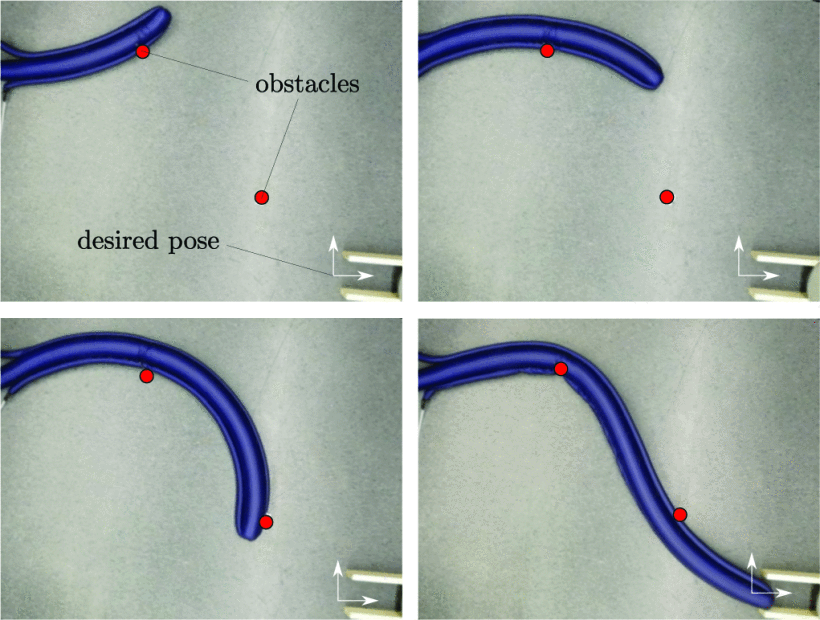
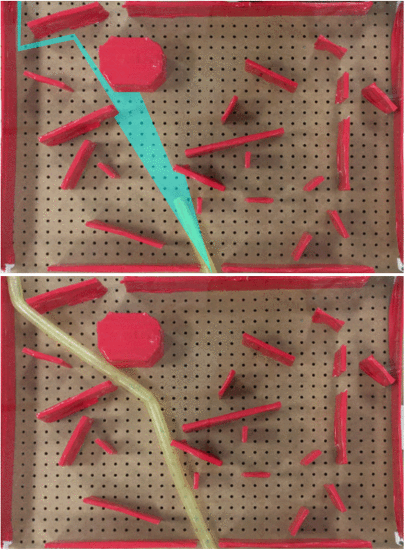
Il lavoro di tesi consiste nello sviluppo ed il confronto di algoritmi di pianificazione del percorso per un robot soft eversivo. Gli algoritmi di pianizicazione sviluppati consentiranno ad un robot eversivo di navigare attraverso un ambiente sfruttando l’interazione con gli ostacoli presenti. L’obiettivo è quello di sviluppare algoritmi di ottimizzazione congiunta di progettazione e sequenza di attuazione per la pratica realizzazione di compiti di navigazione. Dapprima il problema verrà modellato ed analizzato in ambiente Matlab/Simulink. Gli algoritmi sviluppati verranno testati tramite l'uso di simulatori dinamici per robot soft eversivi. Per concludere, il sistema verrà implementato praticamente tramite i robot già disponibili presso il PRISMA Lab/Marte Lab.
[1] M. Selvaggio, L. A. Ramirez, N. D. Naclerio, B. Siciliano and E. W. Hawkes, "An obstacle-interaction planning method for navigation of actuated vine robots," 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 3227-3233, doi: 10.1109/ICRA40945.2020.9196587.
[2] J. D. Greer, L. H. Blumenschein, A. M. Okamura, and E. W. Hawkes, "Obstacle-Aided Navigation of a Soft Growing Robot," 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 4165-4172, doi: 10.1109/ICRA.2018.8460777.
Strumenti
Matlab/Simulink, Vine Robot Simulator, C++, ROS
Docenti di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.