
Immagini di riferimento
Oggetto della tesi
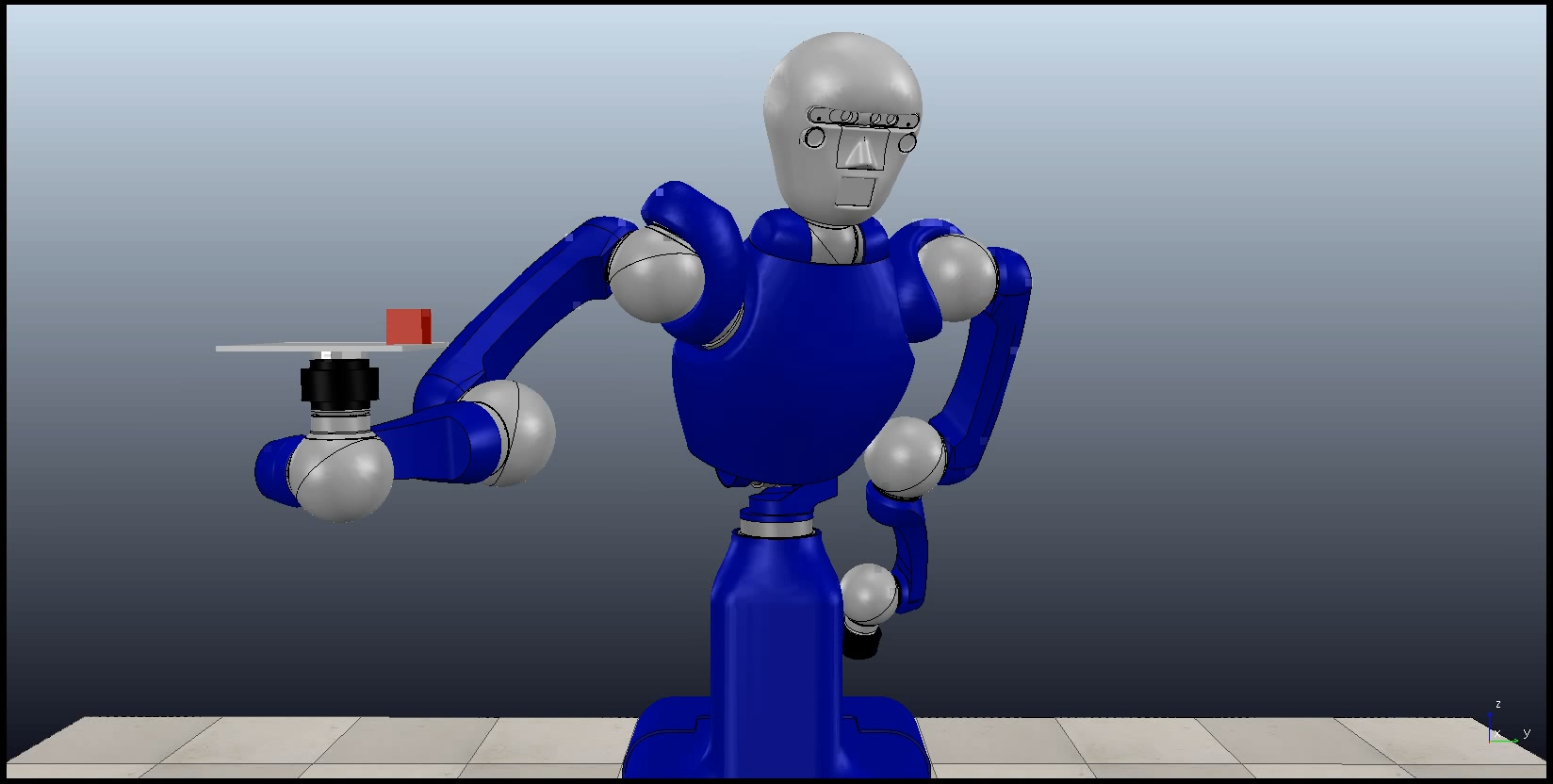
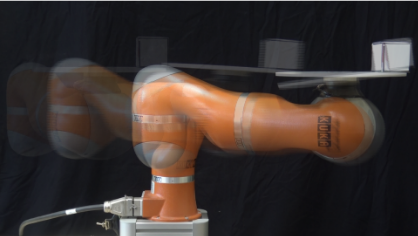
Il lavoro di tesi consiste nello sviluppo ed il confronto di algoritmi di controllo per il trasporto di un oggetto su di un vassoio tramite un robot manipolare. Gli algoritmi di controllo si inseriscono all’interno di un framework che consente di svolgere compiti di manipolazione robotica non prensile pianificati o specificati online da un operatore a più alto livello. L’obiettivo è quello di realizzare il compito garantendo cedevolezza nei confronti di interazioni con l’esterno sconosciute. Dapprima il problema verrà modellato ed analizzato in ambiente Matlab/Simulink. Gli algoritmi sviluppati verranno testati tramite l'uso di simulatori dinamici (e.g. CoppeliaSim, Gazebo). Per concludere, il sistema verrà implementato praticamente tramite i robot già disponibili presso il PRISMA Lab.
[1] M. Selvaggio, J. Cacace, C. Pacchierotti, F. Ruggiero and P. R. Giordano, "A Shared-Control Teleoperation Architecture for Nonprehensile Object Transportation," in IEEE Transactions on Robotics, vol. 38, no. 1, pp. 569-583, Feb. 2022, doi: 10.1109/TRO.2021.3086773.
[2] L. Biagiotti, D. Chiaravalli, L. Moriello and C. Melchiorri, "A plug-in feed-forward control for sloshing suppression in robotic teleoperation tasks", Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 5855-5860, 2018.
Strumenti
Matlab/Simulink, CoppeliaSim, C++, ROS, Rodyman
Docenti di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.