
Immagini di riferimento
Oggetto della tesi
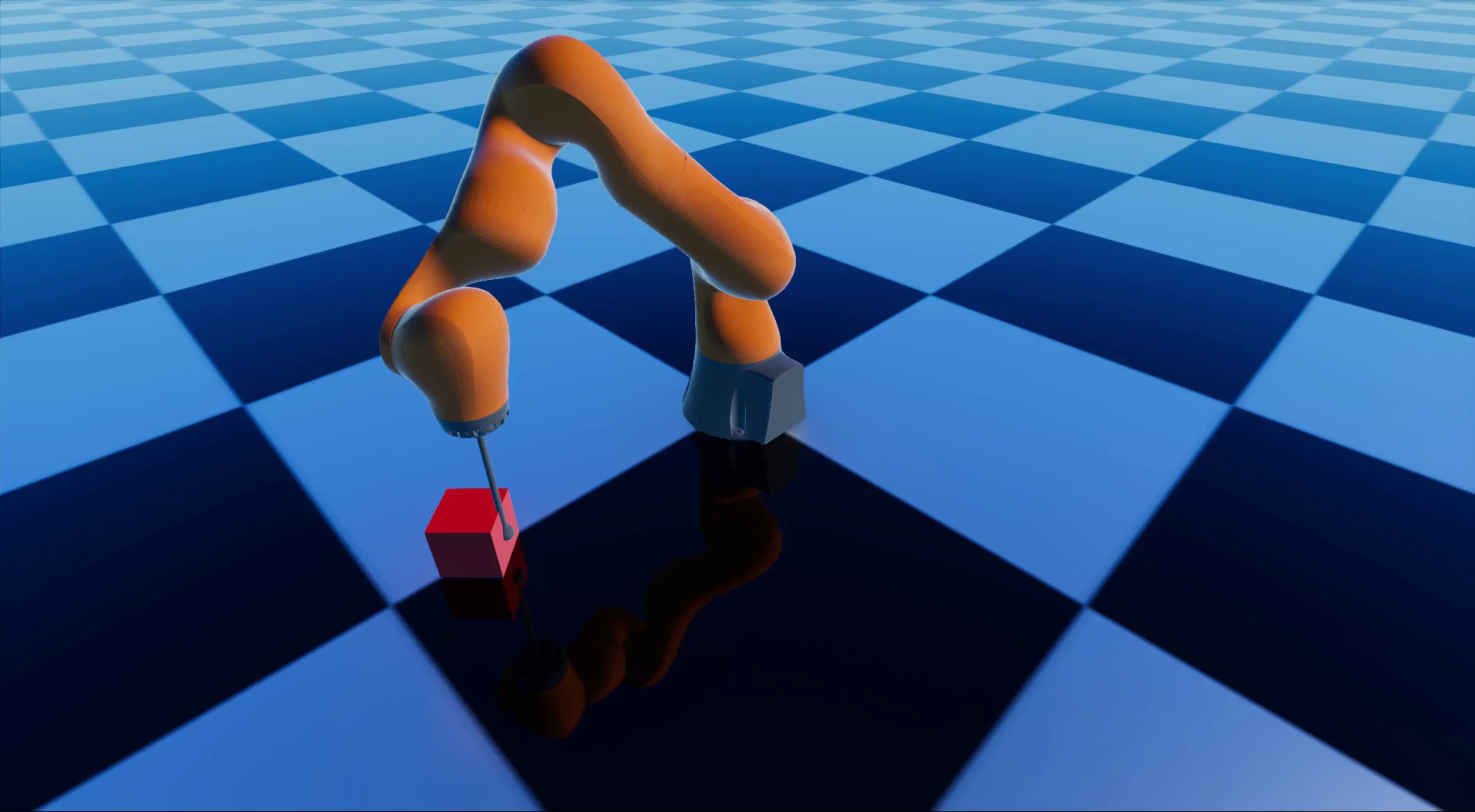
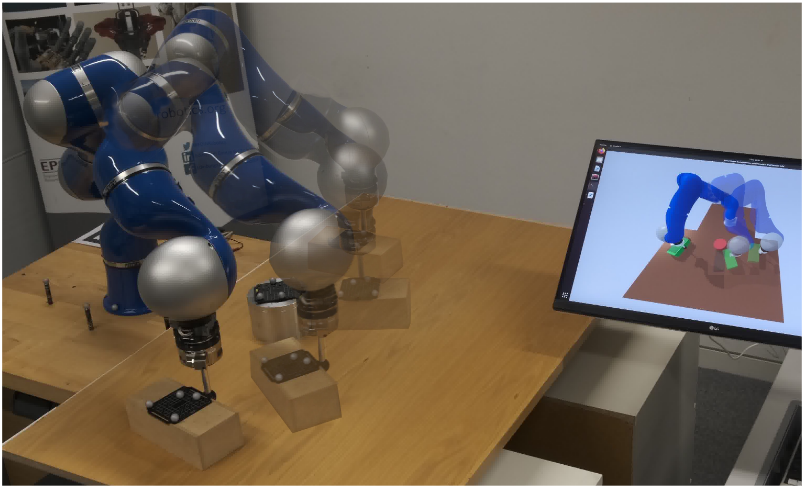
Il lavoro di tesi consiste nello sviluppo ed il confronto di algoritmi di controllo per la spinta di un oggetto lungo una traiettoria tramite un robot manipolare. Gli algoritmi di controllo sviluppati si inseriscono all’interno di un framework che consente di svolgere compiti di manipolazione robotica non prensile pianificati o specificati online da un operatore a più alto livello. L’obiettivo è quello di realizzare il compito garantendo cedevolezza nei confronti di interazioni con l’esterno sconosciute. Dapprima il problema verrà modellato ed analizzato in ambiente Matlab/Simulink. Gli algoritmi sviluppati verranno testati tramite l'uso di simulatori dinamici (e.g. Raisim, Gazebo). Per concludere, gli algoritmi di controllo verranno implementato praticamente sui sistemi robotici già disponibili presso il PRISMA Lab.
[1] Moura J, Stouraitis T, Vijayakumar S. Non-prehensile Planar Manipulation via Trajectory Optimization with Complementarity Constraints. arXiv preprint arXiv:2109.13145. 2021 Sep 27.
[2] Zhou J, Paolini R, Bagnell J A, and Mason M T. A convex polynomial force-motion model for planar sliding: identification and application. In: 2016 IEEE International Conference on Robotics and Automation (ICRA). pp. 372–377.
Strumenti
Matlab/Simulink, Raisim, C++, ROS, Kuka iiwa
Docenti di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.