
Immagini di riferimento
Oggetto della tesi
Il lavoro di tesi, in collaborazione con l’azienda SAB Aerospace, è mirato allo sviluppo del sistema di controllo di un meccanismo di afferraggio in orbita di satelliti in Low Earth Orbit. L’attività si svolge nell’ambito di un programma nazionale promosso dall’Agenzia Spaziale Italiana che ambisce a sviluppare un dimostratore per attività di “In Orbit Servicing”. Con questo termine si considerano operazioni di afferraggio di satelliti finalizzate al re-fuelling, alla sostituzione di parti danneggiate o al de-orbiting di satelliti ormai dismessi.
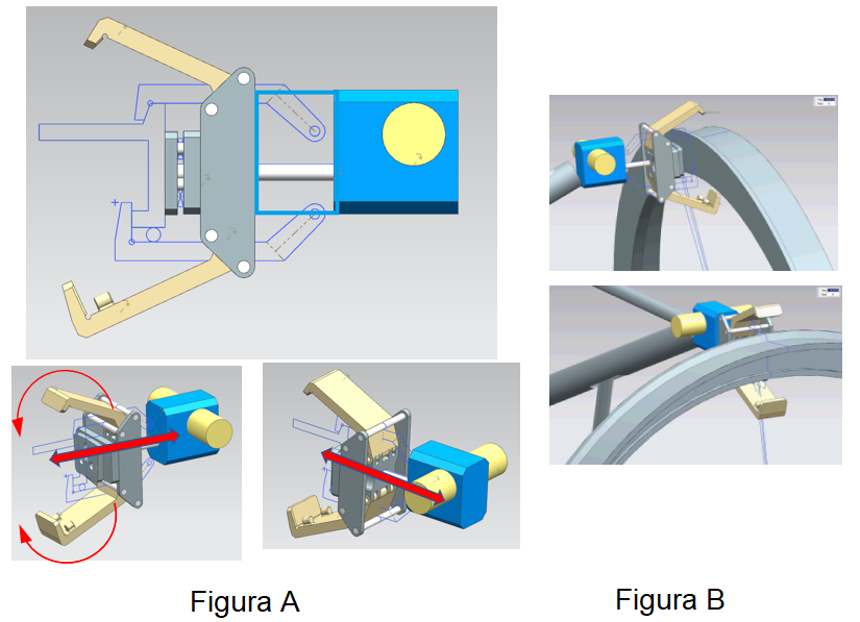
Il meccanismo verrà collegato a un braccio robotico che si occuperà di operarlo. Il meccanismo di afferraggio (Figura A) è basato su un design concettuale che prevede un sistema a 3 gradi di libertà. Figura B mostra un esempio delle fasi di afferraggio simulate con MSC Adams: in questa figura il solo Launcher Interface Ring è rappresentato lato satellite target.
A partire dal design meccanico il candidato dovrà svolgere i seguenti tasks:
- Simulazione e co-simulazione MSC Adams/Matlab
- Identificazione dei sensori e dell’attuatore
- Definizione e implementazione delle leggi di controllo del gripper
- Definizione del Sottosistema Elettrico/Elettronico (PCB+Microprocessore)
- Definizione dell’harness del gripper
- Budget di potenza
- Integrazione del sottosistema elettronico e di controllo
- Definizione, esecuzione e produzione del report dei test funzionali del gripper
Strumenti
MSC Adams, Matlab/Simulink, Gazebo/CoppelliaSim, C++, ROS
Docente di riferimento
Bruno Siciliano - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.