
Immagini di riferimento
Oggetto della tesi
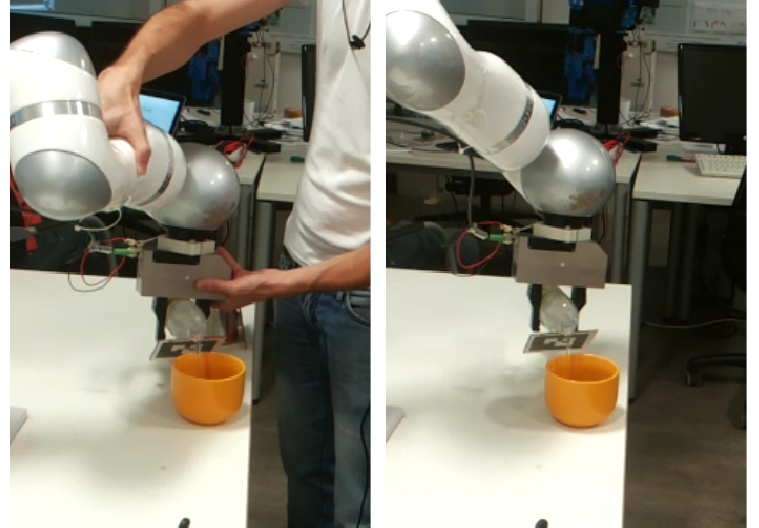
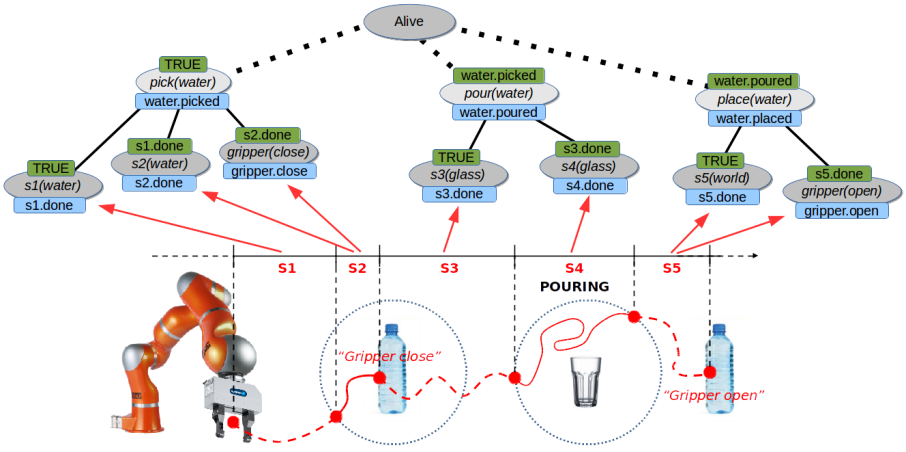
L’apprendimento cinestetico consente a robot collaborativi di apprendere task complessi tramite l’interazione fisica con l’operatore. In questa modalità di apprendimento l’utente agisce nel ruolo di un insegnate che mostra al robot come eseguire un compito guidandolo fisicamente nelle diverse fasi esecutive. Il robot potrà così essere istruito in modo naturale, intuitivo ed incrementale nell’esecuzione di operazioni incrementalmente complesse che dovrà poi eseguire autonomamente o cooperativamente in seguito. In questo lavoro di tesi si propone lo sviluppo di un sistema che integra tecniche di interazione uomo-robot, intelligenza artificiale e controllo per l’apprendimento cinestetico e l’esecuzione di compiti di manipolazione (es., presa ed utilizzo di utensili) integrando il feedback di forza.
Strumenti
C++, ROS, KUKA Sunrise, KUKA IIWA
Docente di riferimento
Alberto Finzi - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.