
Immagini di riferimento

Oggetto della tesi
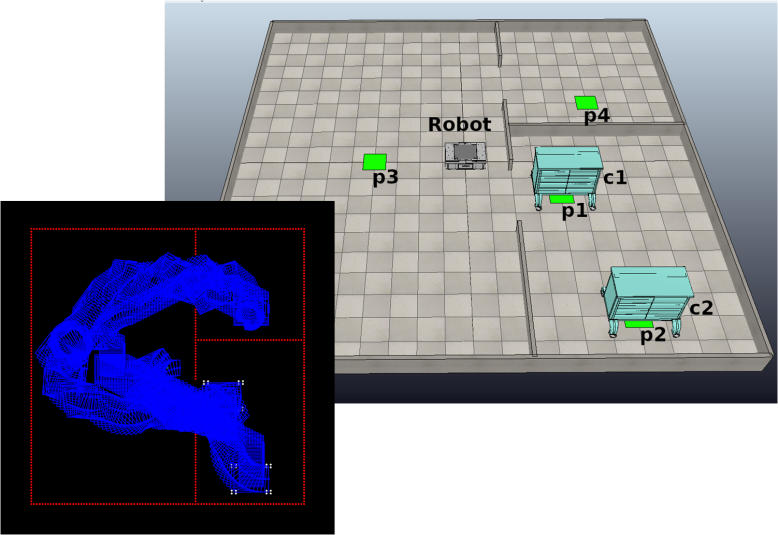
La pianificazione combinata di movimento e di task è un problema estremamente rilevante in robotica che consiste nel trovare una sequenza coerente di azioni di alto livello (vai al tavolo, prendi un oggetto, apri porta, consegna l’oggetto, etc.) ognuna delle quali associata ad una traiettoria libera da ostacoli ed eseguibile per il robot. I due problemi di pianificazione (task e motion) vengono spesso trattati separatamente, ma sono fortemente interdipendenti. In questo lavoro di tesi si propone lo sviluppo di un sistema per la simultanea pianificazione del moto e del task basato su sampling-based planning. Come caso di studio si considereranno problemi di pianificazione per manipolatori mobili impegnati in compiti strutturati di raccolta e consegna di oggetti.
Strumenti
C++, ROS, Coppeliasim, OMPL
Docente di riferimento
Alberto Finzi - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.