
Immagini di riferimento

Oggetto della tesi
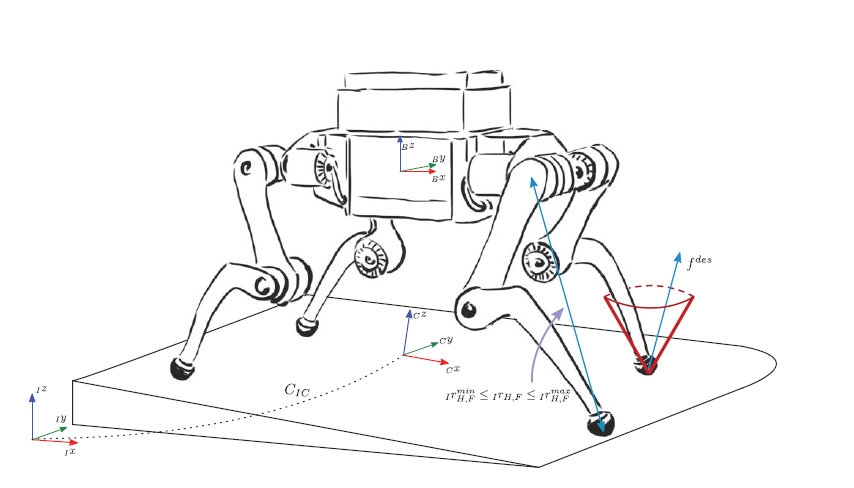
Il lavoro di tesi mira allo studio di algoritmi esistenti in letteratura in grado di riconoscere una situazione di scivolamento di un robot quadrupede in posa statica e di recuperarne la stabilità. L’algoritmo dovrà essere modificato perseguendo due obiettivi:
-
Effettuare il push-recovery anche durante un movimento dinamico
-
Riconoscere l’inevitabilità di una caduta in caso di sbilanciamento ed in tal caso portare il robot in una configurazione tale da minimizzare i danni e facilitare il successivo recupero
Le tecniche di controllo da utilizzare possono essere scelte online in base alla situazione ed alla posa del robot, ad esempio modificando la tipologia di controllo in caso in cui il robot si trovi in una posizione scomposta in seguito ad una caduta. Inoltre, si può pensare di ricostruire la morfologia dell’ambiente sviluppando algoritmi che ne identifichino la pendenza nei vari punti, o individuando la presenza di ostacoli mediante la ricostruzione dei punti di impatto in caso di disturbi esterni non dovuti al contatto con il suolo.
Strumenti
Matlab/Simulink, Gazebo, C++, ROS
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.