
Immagini di riferimento
Oggetto della tesi
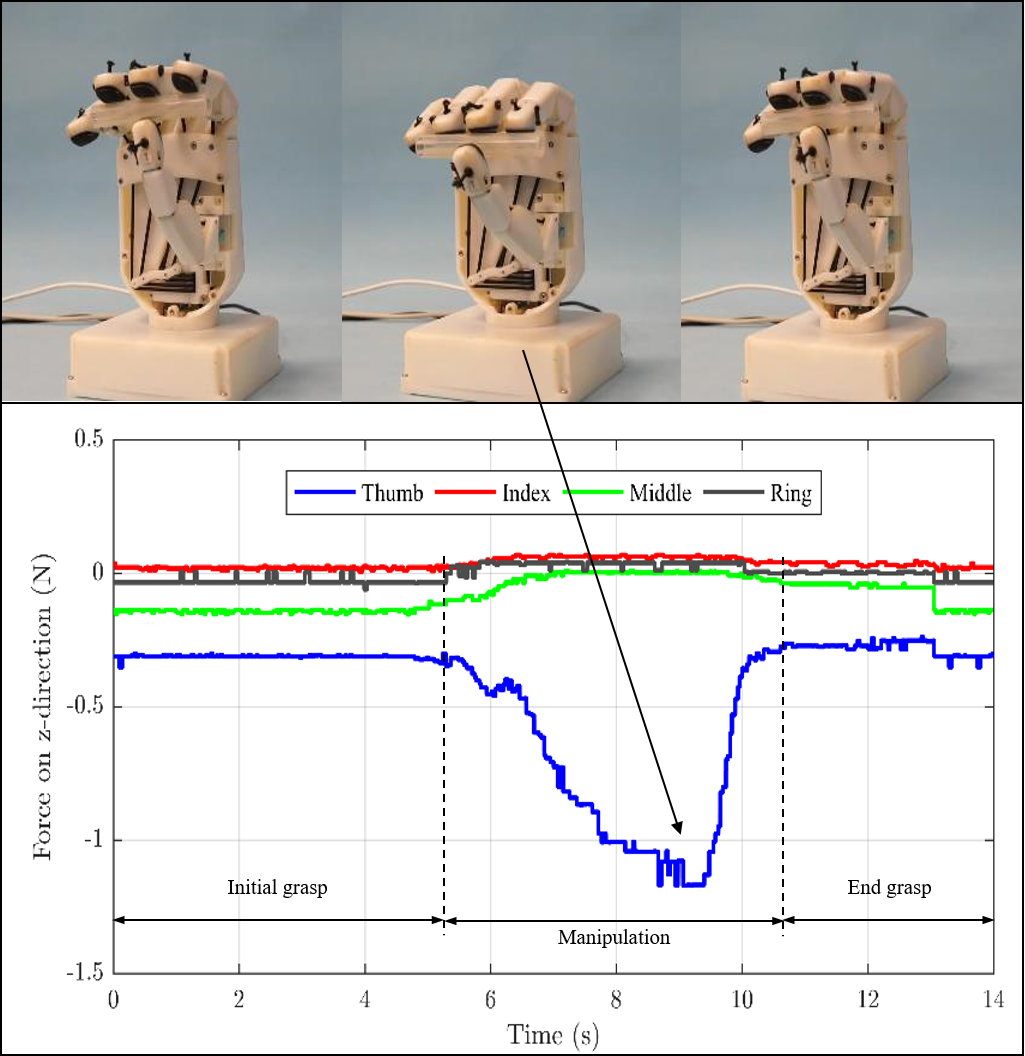
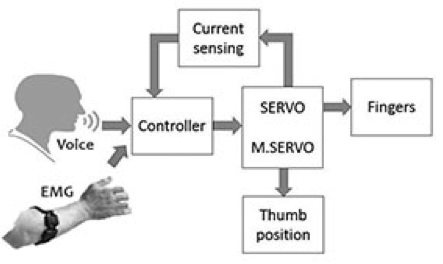
Il progetto di tesi prevede lo sviluppo e l'implementazione di strategie di controllo condiviso che integrano moduli di controllo autonomi basati su feedback sensoriale (informazioni tattili, di forza, di prossimità) con controlli basati su segnali elettromiografici del paziente. I soggetti amputati hanno una attività muscolare ridotta e degradata per cui non sempre è possibile avere a disposizione diversi canali di controllo per movimentare una mano con più di uno/due motori. L’utilizzo di moduli di controllo autonomo consente di migliorare la destrezza e aumentare le capacità di manipolazione riducendo lo stress mentale del paziente. I sensori di forza possono essere utilizzati per regolare le forze di contatto riproducendo movimenti riflessi. I sensori di prossimità e comandi vocali possono essere utilizzati per movimentare l’adduzione/abduzione del pollice difficile da controllare utilizzando EMG. I sensori di prossimità posizionati sul palmo possono essere utilizzati per la stima della forma dell’oggetto e per completare il movimento corretto per la presa attivato dal paziente mediante EMG.
Strumenti
Programmazione di dispositivi a microcontrollore arduino/mbed, machine learning e tecniche di elaborazione dei segnali EMG, C++, PRISMA Hand II
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.