
Immagini di riferimento
Oggetto della tesi
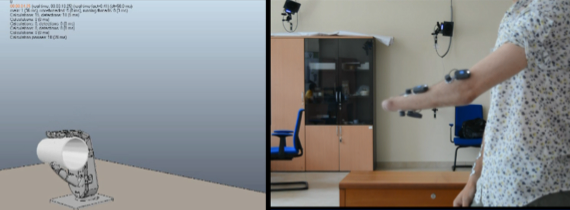
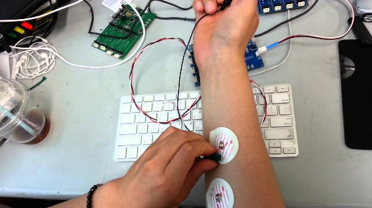
Il lavoro di tesi prevede uno studio sull'associazione dei segnali elettromiografici alle abilità motorie della mano umana per interfacciare i segnali misurati a diverse combinazioni di posizioni dei motori della mano artificiale. Lo studio verrà effettuato su pazienti amputati. L'obiettivo è un'attivazione intelligente delle sinergie motorie per afferrare diversi tipi di oggetti. Lo sviluppo della tesi riguarda i seguenti punti: lo studio di sinergie muscolari e accoppiamento con sinergie motorie della mano robotica; la classificazione dei segnali EMG; la realizzazione di un ambiente di simulazione per il training del paziente e dell’interfaccia di controllo che utilizza i sensori EMG.
Strumenti
CoppeliaSim, Matlab/SIMULINK, software per la simulazione, machine learning e tecniche di elaborazione dei segnali EMG, Python, PRISMA Hand II
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.