
Immagini di riferimento

Oggetto della tesi
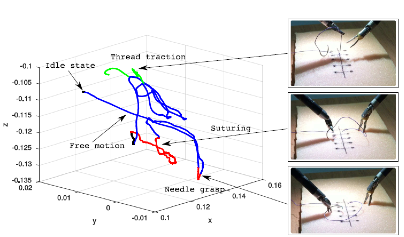
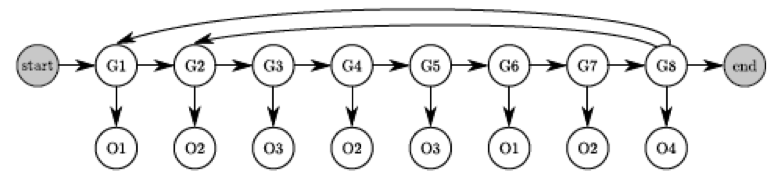
Questo lavoro di tesi prevede l’utilizzo di tecniche di apprendimento per la segmentazione automatica di attività chirurgiche eseguite in teleoperazione nella chirurgia minimamente invasiva assistita da robot. Si utilizzerà l’integrazione di informazioni sensoriali di forza e visione per riconoscere il gesto chirurgico e classificare compiti elementari durante l’esecuzione di task complessi. Saranno investigate tecniche di apprendimento come Gaussian Mixture Models (GMM) e Hidden Markov Models (HMM). Lo studio estensivo dei singoli task verrà effettuato in collaborazione con i chirurghi di ICAROS. La classificazione di procedure chirurgiche robotizzate verrà fatta sulla base di su una serie di dimostrazioni da parte di esperti chirurghi. Inoltre, le tecniche di riconoscimento dei gesti e classificazione saranno utilizzate anche per sviluppare metodi di valutazione delle performance del chirurgo.
Strumenti
da Vinci Research Kit, sensori di forza, sensori di visione, machine learning, ROS, C++
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.