
Immagini di riferimento
Oggetto della tesi
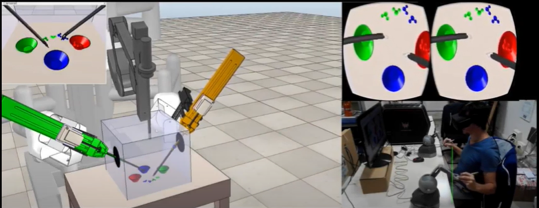
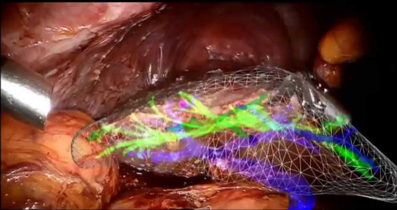
Il lavoro di tesi consiste nello sviluppo di software per la simulazione realistica di operazioni chirurgiche la cui finalità è il training di giovani chirurghi e/o il test di nuove strategie di controllo e nuovi strumenti. Uno degli obiettivi è la realizzazione di modelli 3D di organi da immagini mediche. La simulazione di modelli anatomici di organi prevede l’associazione di un modello fisico che consentirà di sviluppare un feedback aptico compatibile con la deformazione dovuta alla interazione degli strumenti chirurgici con l'organo stesso nell'ambiente virtuale. I simulatori sviluppati saranno integrati al simulatore già esistente del robot da Vinci con le sue interfacce aptiche e visori. La tesi prevede l’utilizzo di simulatori, physics engines open source e modelli matematici per rappresentare la deformazione e la collisione tra oggetti rigidi e deformabili.
Strumenti
da Vinci simulator, Metodo degli elementi finiti (FEM), Software CAD 3D, Interfacce aptiche, simulatori open source (SOFA, CoppeliaSim), Phyton, C++, ROS
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Laura Mecozzi - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.