
Immagini di riferimento
Oggetto della tesi
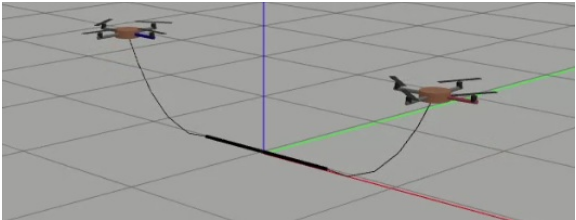
Il lavoro di tesi consiste nello sviluppo di algoritmi di pianificazione della traiettoria per manipolatori aerei che trasportano collaborativamente un oggetto tramite cavi. L'obiettivo è quello di calcolare traiettorie che siano il più rubusto possibile rispetto alle incertezze parametriche presenti nel sistema. Dapprima il problema verrà modellato ed analizzato tramite matlab. Gli algoritmi sviluppati verranno testati e infine validati attraverso l'uso di simulatori dinamici (e.g., Gazebo). Per concludere, il sistema verrà implementato praticamente tramite i robot già disponibili presso il PRISMA Lab.
[1] C. Gabellieri, M. Tognon, D. Sanalitro and A. Franchi, "Equilibria, Stability, and Sensitivity for the Aerial Suspended Beam Robotic System Subject to Parameter Uncertainty," in IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3977-3993, Oct. 2023, doi: 10.1109/TRO.2023.3279033.
[2] M. Tognon, C. Gabellieri, L. Pallottino and A. Franchi, "Aerial Co-Manipulation With Cables: The Role of Internal Force for Equilibria, Stability, and Passivity," in IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 2577-2583, July 2018, doi: 10.1109/LRA.2018.2803811.
Strumenti
ROS/Gazebo, Matlab, C++, ROS, Github
Docenti di riferimento
Mario Selvaggio - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.