
Immagini di riferimento

Oggetto della tesi
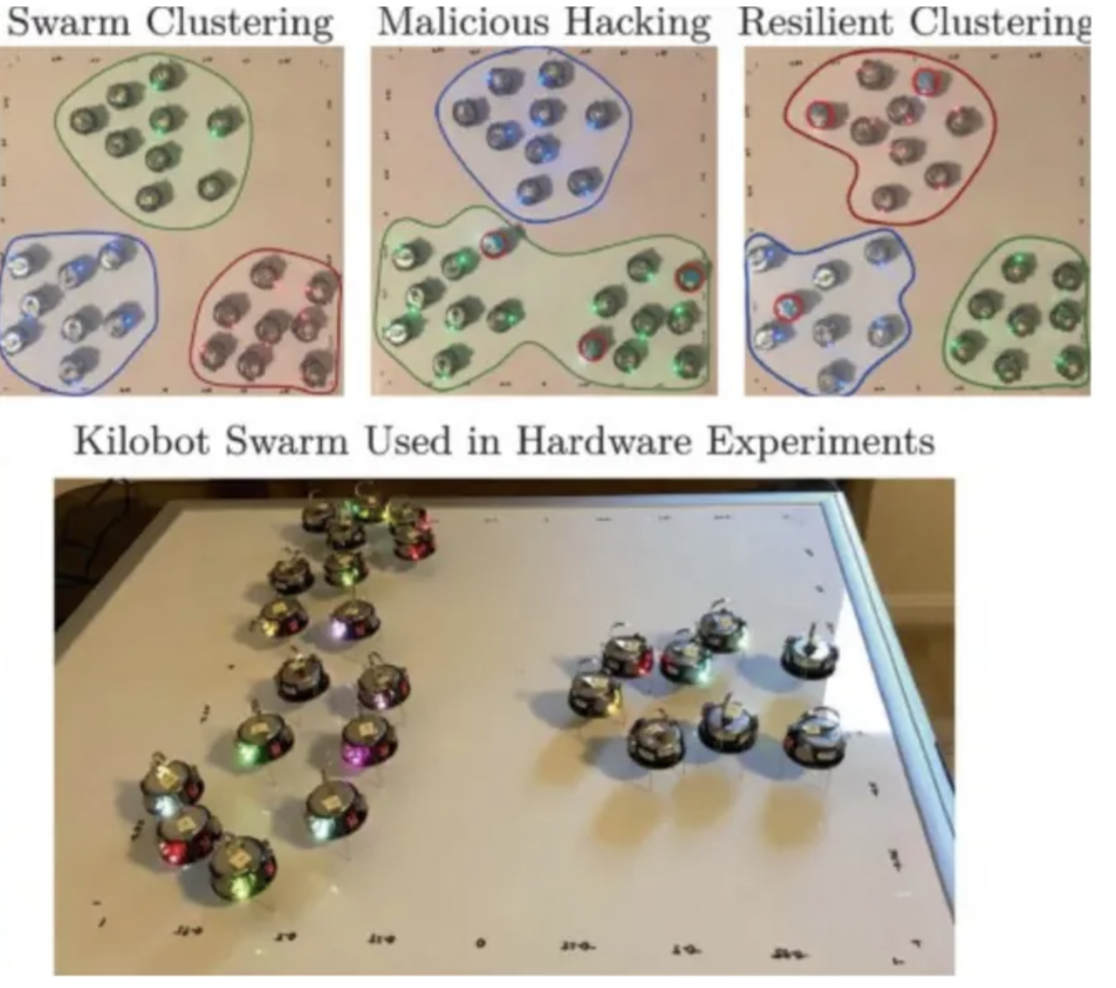
L'obiettivo di questa tesi è progettare e validare teoricamente (utilizzando metodi di Lyapunov, teoria dei grafi, ecc.) nuove leggi di controllo per il raggiungimento autonomo del consenso di cluster di uno sciame di veicoli robotici soggetti a vincoli di rilevamento (portata limitata, campo visivo limitato) sulla base del quadro generale di connettività in [1]. La formazione di cluster consente a un team multi-robot di eseguire più attività simultaneamente in missioni collaborative multi-obiettivo. Il lavoro svolto durante il tirocinio sarà validato in simulazione e sperimentalmente utilizzando una flotta di robot mobili.
La tesi è svolta in collaborazione con l’INIRA, sede di Rennes, in Francia.
[1] Robuffo Giordano, P., Franchi, A., Secchi, C., & Bülthoff, H. H. (2013). A passivity-based decentralized strategy for generalized connectivity maintenance. The International Journal of Robotics Research, 32(3), 299-323.
[2] Xia, W., & Cao, M. (2011). Clustering in diffusively coupled networks. Automatica, 47(11), 2395-2405.
Strumenti
ROS2, Gazebo, Python, C++, Matlab
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.