
Immagini di riferimento
Oggetto della tesi
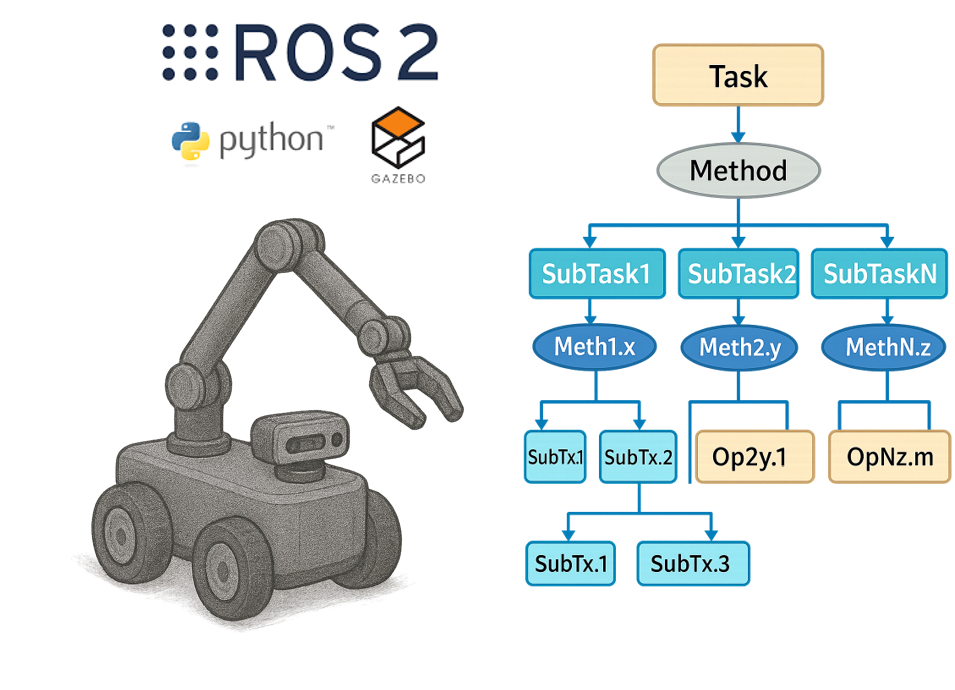
La pianificazione gerarchica consente la decomposizione scalabile di task complessi in sotto-task associati a sotto-obiettivi fino alle azioni primitive. L’inserimento dinamico di sotto-task durante la pianificazione e l’esecuzione aumenta la flessibilità del sistema, ma anche la sua complessità. Inoltre il continuo monitoraggio e la ripianificazione dei task/sotto-task durante l’esecuzione richiede una stretta e sinergica integrazione tra planner e sistema esecutivo. L'obiettivo della tesi è progettare un sistema di pianificazione gerarchica ed esecuzione con task insertion dinamico che permetta l’esecuzione e il monitoraggio basati su grafi di processo/comportamento.
Strumenti
Python, ROS2, PDDL/HDDL, BehaviorTree, CPP, custom graph engine, AIPlan4EU
Docente di riferimento
Riccardo Caccavale - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.