
Immagini di riferimento

Oggetto della tesi
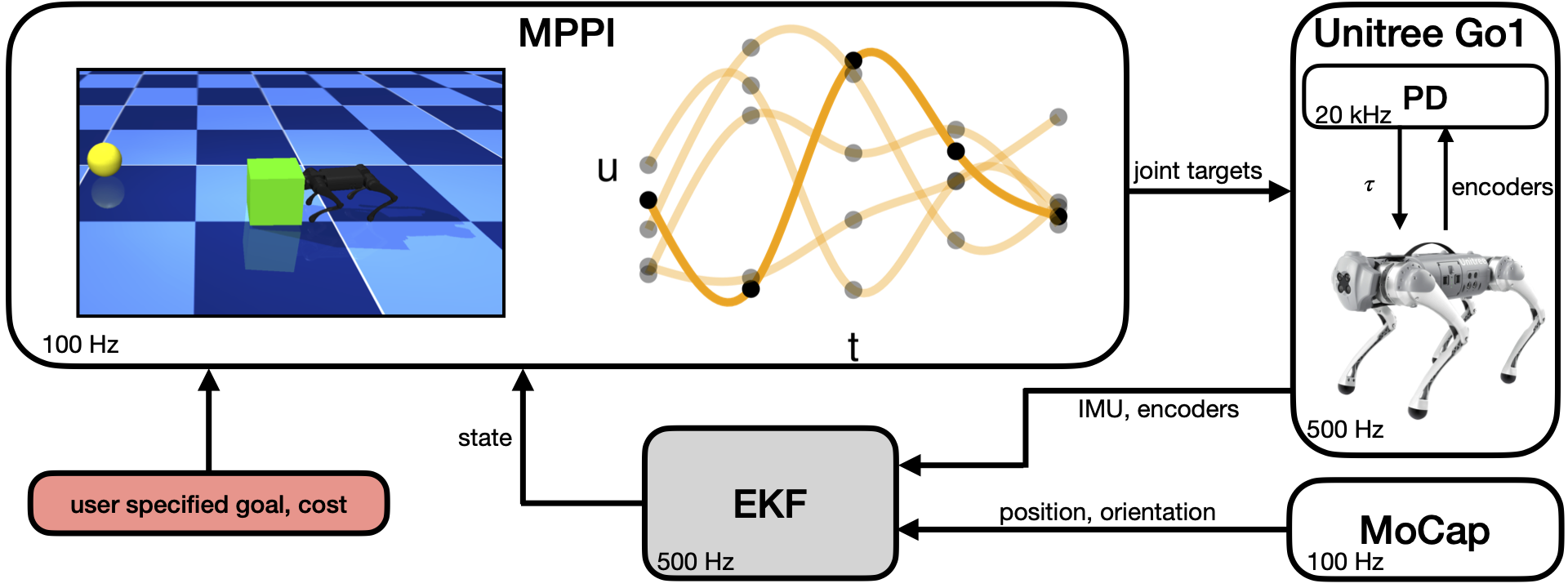
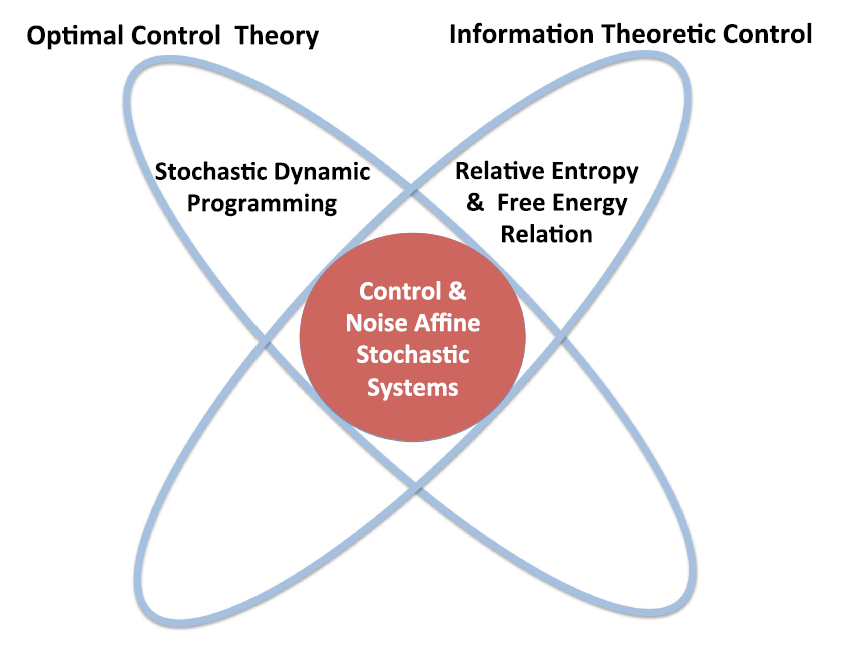
La tesi ha l’obiettivo di sviluppare algoritmi di controllo per robot dotati di gambe che operano in ambienti caratterizzati da elevata incertezza. A tal fine, si propone l’adozione di approcci ibridi model-based e data-driven, nei quali i modelli incorporano in modo esplicito la componente stocastica legata all’incertezza ambientale.
Strumenti
C++, Python, Gazebo, RaiSim, Nvidia Isaac, MuJoCo
Docenti di riferimento
Pierluigi Arpenti – Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.