
Immagini di riferimento
Oggetto della tesi
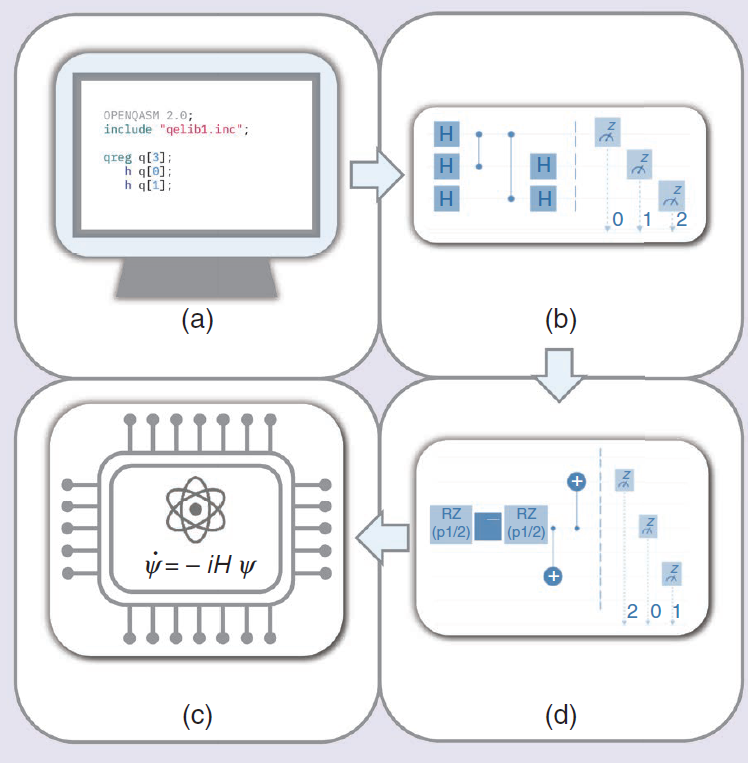
La tesi ha l’obiettivo di sviluppare algoritmi di controllo di alto livello per robot mobili su ruote, finalizzati all’esecuzione di compiti di navigazione e SLAM, sfruttando approcci innovativi basati sulla computazione quantistica. Gli algoritmi verranno progettati utilizzando simulatori di computer quantistici e, ove possibile, testati su hardware quantistico reale.
Strumenti
Matlab, C++, Python, Gazebo, Nvidia Isaac, IBM Quantum
Docenti di riferimento
Pierluigi Arpenti - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Riccardo Caccavale - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.