
Immagini di riferimento
Oggetto della tesi
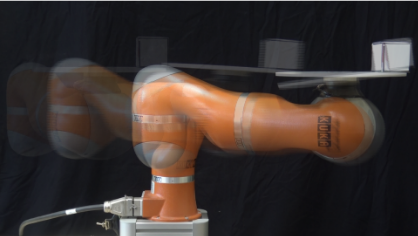
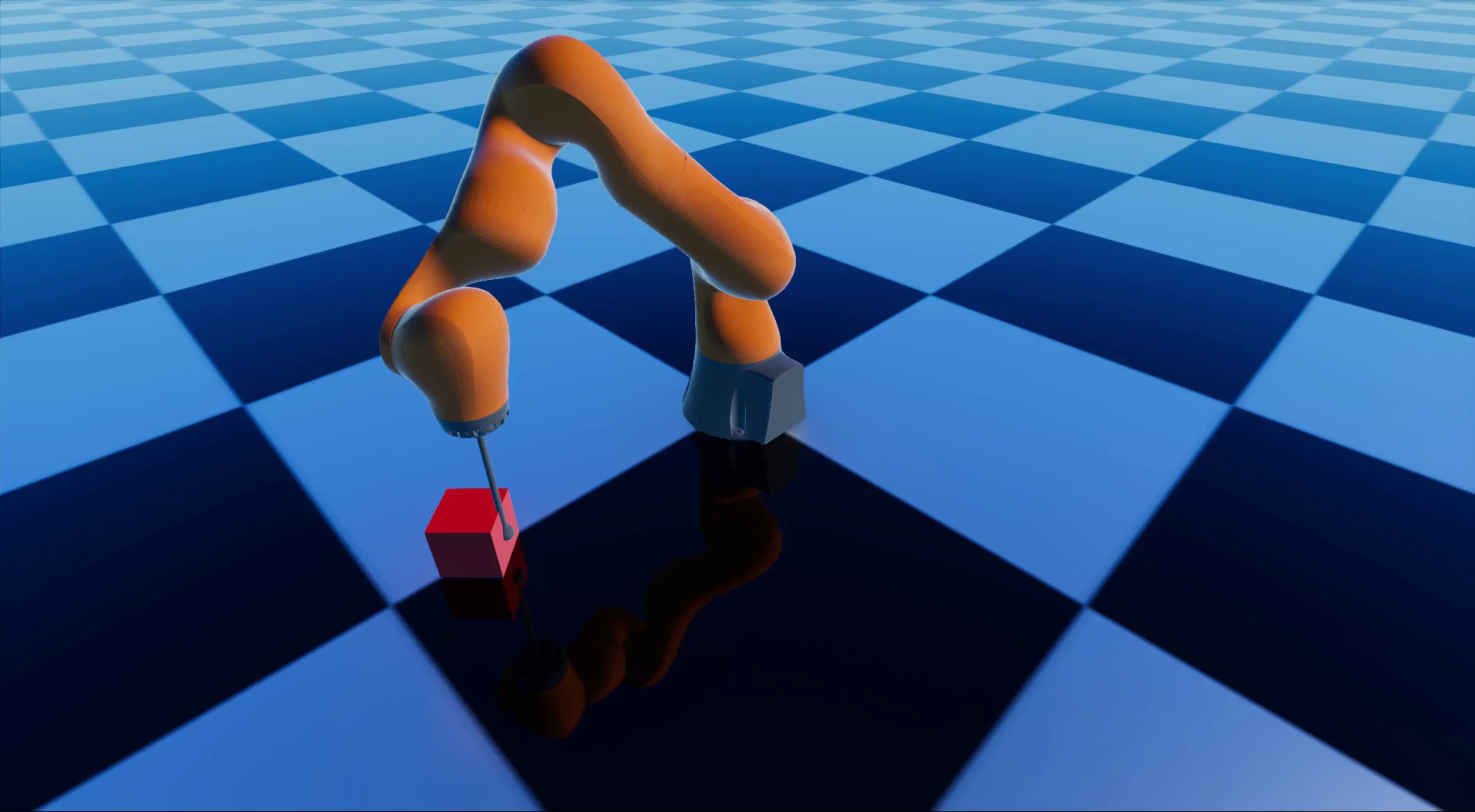
Nell’ambito della manipolazione non prensile, il lavoro di tesi si propone di migliorare le tecniche di controllo basate su MPC [1] correntemente adottate per la spinta planare di un oggetto con un manipolatore controllato in impedenza [2]. L’obiettivo primario è quello di approfondire i problemi legati all’applicazione, risolverli, e generalizzare gli algoritmi migliorare accuratezza e robustezza del controllo sfruttando eventualmente feedback di forza [3]. I problemi verranno dapprima modellati ed analizzati in ambiente MATLAB. Il controllo sviluppato sarà testato tramite l'uso di simulatori dinamici (e.g., Raisim, Gazebo). Per concludere, il tutto verrà implementato sui robot manipolatori già disponibili presso il PRISMA Lab.
[1] J. Moura, T. Stouraitis, and S. Vijayakumar, “Non-prehensile planar manipulation via trajectory optimization with complementarity constraints,” in 2022 Int. Conf. Robot. Autom., pp. 970–976, 2022.
[2] F. Cufino, M. Selvaggio, F. Amadio, F. Ruggiero, "Compliant Non-Prehensile Pushing Manipulation," in IEEE Transactions on Robotics, to appear.
[3] S. Federico, M. Costanzo, M. De Simone, C. Natale "Nonlinear Model Predictive Control for Robotic Pushing of Planar Objects With Generic Shape" in IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 3006-3013, March 2025, doi: 10.1109/LRA.2025.3539092.
Strumenti
Raisim, ROS 2, Matlab, Docker, Git, Acados, C++
Docenti di riferimento
Mario Selvaggio - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.