
Immagini di riferimento


Oggetto della tesi
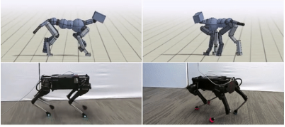
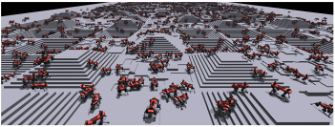
L'obiettivo della tesi è quello di realizzare algoritmi di controllo per robot su gambe sfruttando diverse metodologie di Machine Learning al fine di compiere particolari task di locomozione e di manipolazione. Tra le diverse possibilità ci sono, tra le altre, quelle di far muovere il robot con un approccio biomimetico tramite l'adozione di strategie di Imitation Learning, quella di realizzare un algoritmo per cambiare online il gait assunto dal robot, quella di afferrare al volo una palla e quella di completare il passaggio del testimone in una staffetta. Il controllore, ove possibile, potrà interfacciarsi con l'hardware reale.
Strumenti
C++, Python, Gazebo, RaiSim, Nvidia Isaac
Docenti di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Pierluigi Arpenti - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.