
Immagini di riferimento
Oggetto della tesi
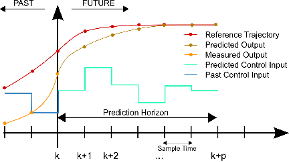
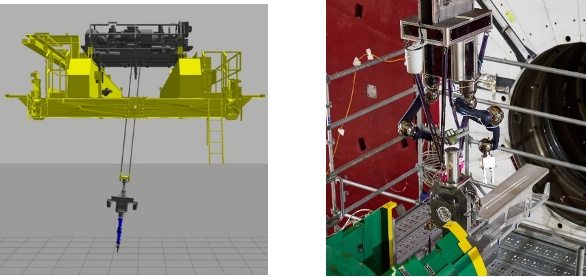
Il compito consiste nel formulare e sviluppare l'architettura di un MPC per il caso di studio in analisi, partendo da un modello dinamico del sistema già in uso. L'obiettivo del controllo è smorzare le oscillazioni del sistema sospeso a cavi utilizzando i giunti del braccio come input di controllo, considerando l'impossibilità di controllare il carroponte. Lo studio può essere limitato nella sua fase iniziale a condizioni semplificate (oscillazione lungo un singolo piano e lunghezza fissa del cavo) e poi esteso in una seconda fase. Le prestazioni del controllo saranno testate in simulazione (ambiente MATLAB o ROS-Gazebo) e, in una seconda fase, sul sistema reale.
La tesi prevede, nella seconda parte, uno sviluppo presso il CERN (dai 2 ai 3 mesi).
Strumenti
MATLAB, C++, ROS, Gazebo, Schunk/Pilz robotic arms
Docenti di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.