
Immagini di riferimento
Oggetto della tesi
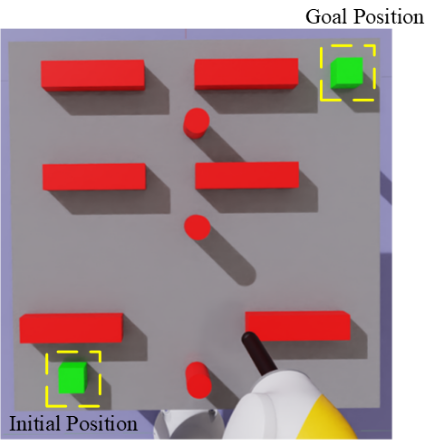
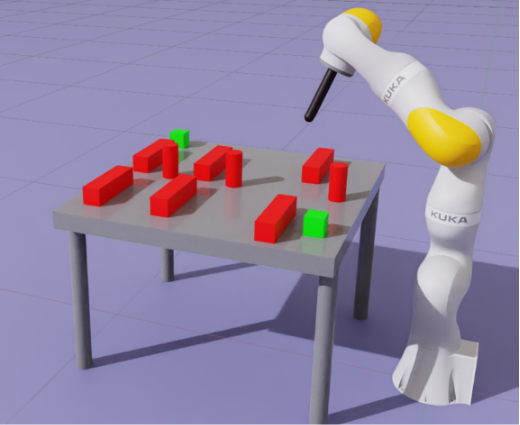
Questo progetto di tesi si concentra sullo sviluppo di un framework robusto di apprendimento con rinforzo (Deep Reinforcement Learning) per la manipolazione tramite spinta non prensile in ambienti con ostacoli. Il progetto mira ad addestrare un sistema robotico intelligente in grado di spingere un oggetto da una configurazione iniziale a una posizione finale evitando collisioni con ostacoli, come illustrato in Figura. La tesi prevede i seguenti obiettivi:
- Sviluppare un framework di apprendimento basato su rinforzo per la spinta non prensile in ambienti con ostacoli
- Implementare e addestrare il sistema nell'ambiente di simulazione IsaacLab
- Trasferire con successo la policy appresa su un vero manipolatore KUKA LBR iiwa 7
- Ottenere prestazioni affidabili con diverse proprietà degli oggetti e configurazioni ambientali
[1] Dengler, Nils, David Großklaus, and Maren Bennewitz. ”Learning goal-oriented non-prehensile pushing in cluttered scenes.” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022.
[2] Peng, Xue Bin, et al. ”Sim-to-real transfer of robotic control with dynamics randomization.” 2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2018.
[3] Yuan, Weihao et al. “End-to-end nonprehensile rearrangement with deep reinforcement learning and simulation-to-reality transfer.” Robotics Auton. Syst. 119 (2019): 119-134.
[4] Ferrandis, Juan Del Aguila, Joao Moura, and Sethu Vijayakumar. ”Nonprehensile planar manipulation through reinforcement learning with multimodal categorical exploration.” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023.
[5] Dengler, Nils, et al. ”Learning Goal-Directed Object Pushing in Cluttered Scenes with Location-Based Attention.” arXiv preprint arXiv:2403.17667 (2024).
Strumenti
IsaacLab/IsaacGym, RL, KUKA LBR iiwa 7, Docker, Git, C++
Docenti di riferimento
Mario Selvaggio – Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.