
Immagini di riferimento
 .
. 
Oggetto della tesi
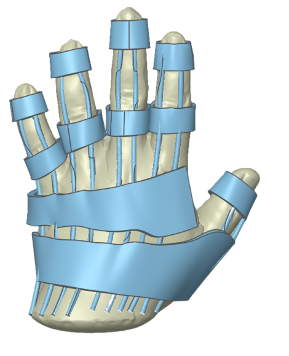
Negli ultimi anni, la robotica soft si è affermata come una promettente alternativa ai dispositivi rigidi tradizionali, grazie alla sua maggiore adattabilità e indossabilità. Tuttavia, molte soluzioni esistenti presentano ancora limitazioni in termini di adattabilità alle diverse esigenze mediche. In quest’ultimo contesto si innesta il progetto di un sistema ibrido protesi–esoscheletro, progettato con un’architettura modulare che unisce i vantaggi della robotica soft alla versatilità e personalizzazione tipiche delle protesi avanzate.
Lo sviluppo della tesi può riguardare uno dei seguenti punti:
- modellazione di una protesi che si pone al confine tra esoscheletro e protesi
- progettazione del controllore che includa anche il segnale elettromiografico
- realizzazione dell’attuazione
[1] A. Mohammadi, J. Lavranos, P. Choong, and D. Oetomo, “Flexo-glove: a 3d printed soft exoskeleton robotic glove for impaired hand rehabilitation and assistance,” in 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2018, pp. 2120–2123.
[2] B. B. Kang, H. Lee, H. In, U. Jeong, J. Chung, and K.-J. Cho, “Development of a polymer-based tendon-driven wearable robotic hand,” in 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 3750–3755.
[3] D. Chiaradia, L. Tiseni, M. Xiloyannis, M. Solazzi, L. Masia, and A. Frisoli, “An assistive soft wrist exosuit for flexion movements with an ergonomic reinforced glove,” Frontiers in Robotics and AI, vol. 7, p. 595862, 2021.
[4] S.-S. Yun, B. B. Kang, and K.-J. Cho, “Exo-glove pm: an easily customizable modularized pneumatic assistive glove,” IEEE Robotics and Automation Letters, vol. 2, no. 3, pp. 1725–1732, 2017.
[5] Tsabedze, E. Hartman, E. Abrego, C. Brennan, and J. Zhang, “Tsabrag: a twisted string actuator-powered biomimetic robotic assistive glove,” in 2020 International Symposium on Medical Robotics (ISMR). IEEE, 2020, pp. 159–165.
Strumenti
Arduino, stampa 3D a filamento, resina e silicone, scanner 3D, software CAD (SolidWorks, Solid Edge, AutoCAD, quickSurface), produzione di prototipi elettronici
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.