
Immagini di riferimento


Oggetto della tesi
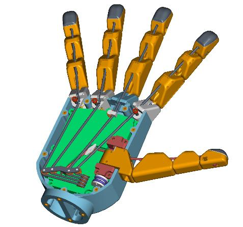
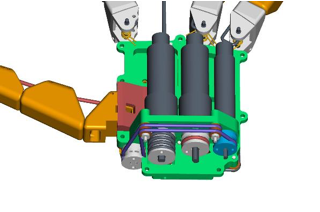
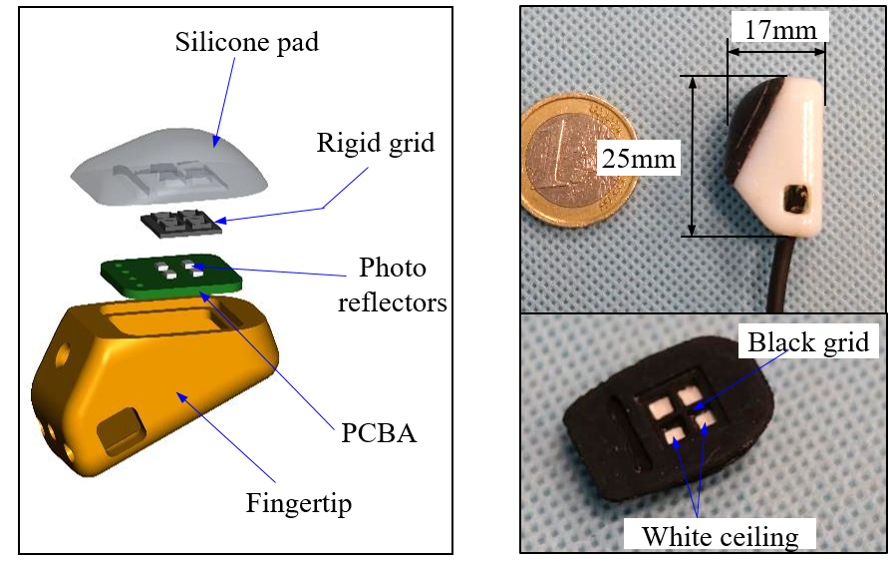
Il lavoro di tesi prevede lo studio della cinematica di mani artificiali e dei meccanismi di trasmissione del moto con l'obiettivo di implementare meccanicamente movimenti coordinati. Il lavoro prevede anche la sensorizzazione della mano mediante sensori tattili per regolare le forze di contatto e sensori di prossimità da inserire nel palmo della mano. L'introduzione della cedevolezza nella struttura meccanica è un altro aspetto da perseguire. Lo sviluppo della tesi può riguardare uno dei seguenti punti:
- Progettazione del sistema di attuazione della mano per realizzare rigidezza variabile, scelta del numero ottimo di motori e delle trasmissioni del moto ai giunti, introduzione di elasticità ai giunti e/o ai tendini
- Sensorizzazione della mano (tecnologia FBG, tecnologia optoelettronica)
- Progettazione di un polso attuato e di una socket sensorizzata per il controllo basato su segnali EMG
Strumenti
Arduino, 3D printing, software CAD (SolidWorks, Solid Edge, AutoCAD), electronic prototype manufacturing, optoelectronic technology, PRISMA Hand II
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.