
Immagini di riferimento

Oggetto della tesi
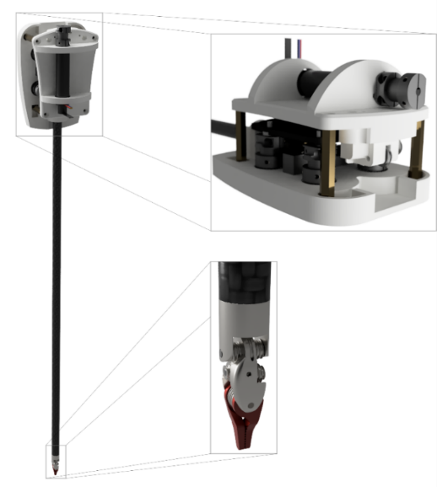
Gli attuali strumenti utilizzati dal robot chirurgico Da-Vinci hanno in totale 4 DOF. In questo progetto, è stato sviluppato un nuovo strumento con un DOF in più che aumenta le sue capacità di manipolazione. Il meccanismo di azionamento guidato dal tendine di uno strumento laparoscopico standard da Vinci viene modificato aggiungendo una puleggia aggiuntiva utilizzata per azionare il DOF aggiuntivo responsabile del rotolamento dell'oggetto. Pertanto, lo strumento standard verrà modificato per ospitare un motore aggiuntivo per controllare il quinto DOF della pinza modificata. Successivamente, verrà sviluppato un sistema di controllo in retroazione per controllare la posizione del motore.
Strumenti
Solidworks, 3D printing (resin and FDM), Arduino, manufacturing, ROS
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.