
Immagini di riferimento
https://www.youtube.com/watch?v=LSGkYN8lZvw
Oggetto della tesi
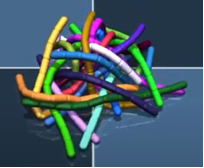
Il lavoro di tesi si svolge in collaborazione con l’istituto di ricerca INESC-TEC in Porto (Portogallo). L'obiettivo di questa tesi è quello di sviluppare un plugin per il simulatore SOFA in grado di simulare tentativi di presa di tubi flessibili che possono rappresentare una tipica applicazione di servizio in ambito sanitario o industriale. In ogni tentativo di presa, un tubo viene raccolto in una posizione specifica e spostato attraverso una serie di punti di controllo/waypoint per rimuoverlo dal cestino. Il plugin registrerà alcune metriche relative alla qualità della presa (come ad esempio, quanto gli altri tubi nel cestino si sono spostati durante la rimozione). Il plugin sarà integrato in una pipeline di “bin picking” sviluppato da Gonçalo Leão, un dottorando, che sta svolgendo attività di ricerca presso INESC-TEC, un istituto di ricerca e sviluppo a Porto (Portogallo), in collaborazione con l'Università degli Studi di Napoli Federico II. In precedenza, Gonçalo Leão ha sviluppato plugin simili nei simulatori MuJoCo e Gazebo.
(demo in MuJoco: https://www.youtube.com/watch?v=LSGkYN8lZvw)
(demo in Gazebo: https://youtu.be/ O-6Ayb6LP4U ?t=30)
Il principale aspetto innovativo di questa tesi è lavorare con oggetti flessibili per il bin picking, poiché attualmente ci sono pochissime ricerche e soluzioni in grado di eseguire bin picking con questo tipo di oggetti.
G. Leão, C. M. Costa, A. Sousa, L. P. Reis, and G. Veiga, “Using Simulation to Evaluate a Tube Perception Algorithm for Bin Picking”, Robotics, vol. 11, no. 2, p. 46, Apr. 2021.
https://www.researchgate.net/publication/359745643_Using_Simulation_to_Evaluate_a_Tube_Perception_Algorithm_for_Bin_Picking
G. Leão, C. M. Costa, A. Sousa, and G. Veiga, “Detecting and Solving Tube Entanglement in Bin Picking Operations”, Applied Sciences, vol. 10, no. 7, p. 2264, Mar. 2020.
https://www.researchgate.net/publication/340243474_Detecting_and_Solving_Tube_Entanglement_in_Bin_Picking_Operations
V. E. Arriola-Rios, P. Guler, F. Ficuciello, D. Kragic, B. Siciliano, J. L. Wyatt, “Modeling of Deformable Objects for Robotic Manipulation: A Tutorial and Review”, Frontiers in Robotics and AI, vol. 7, p. 82, Sep. 2020.
https://www.researchgate.net/publication/345016920_Modeling_of_Deformable_Objects_for_Robotic_Manipulation_A_Tutorial_and_Review
Strumenti
SOFA, C++, ROS
Docenti di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.