
Immagini di riferimento
Oggetto della tesi
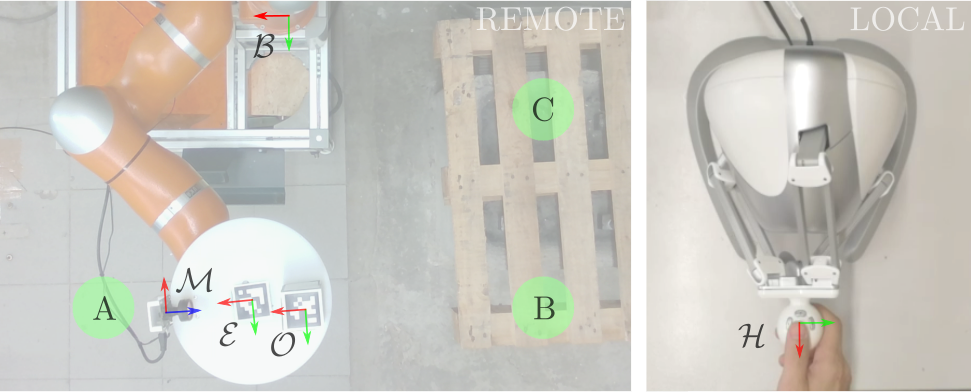
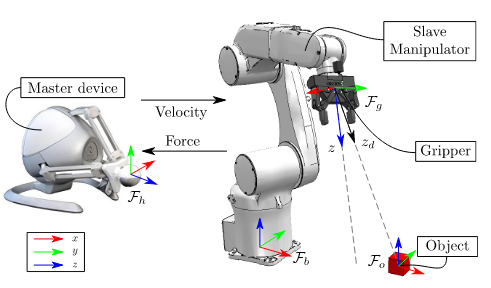
Il lavoro di tesi consiste nello sviluppo ed il confronto di algoritmi di controllo condiviso per la teleoperazione di robot di servizio. Gli algoritmi di controllo condiviso sviluppati consentiranno ad un operatore ed un controllo autonomo di comandare simultaneamente un robot per svolgere un compito di manipolazione. L’obiettivo è quello di realizzare il compito minimizzando lo sforzo fisico e cognitivo di un operatore attraverso guida aptica. Dapprima il problema verrà modellato ed analizzato in ambiente Matlab/Simulink. Gli algoritmi sviluppati verranno testati tramite l'uso di simulatori dinamici (e.g. CoppeliaSim, Gazebo). Per concludere, il sistema verrà implementato praticamente tramite i robot già disponibili presso il PRISMA Lab.
[1] M. Selvaggio, P. Robuffo Giordano, F. Ficuciello and B. Siciliano, "Passive Task-Prioritized Shared-Control Teleoperation with Haptic Guidance," 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 430-436, doi: 10.1109/ICRA.2019.8794197.
[2] M. Selvaggio, J. Cacace, C. Pacchierotti, F. Ruggiero and P. R. Giordano, "A Shared-Control Teleoperation Architecture for Nonprehensile Object Transportation," in IEEE Transactions on Robotics, vol. 38, no. 1, pp. 569-583, Feb. 2022, doi: 10.1109/TRO.2021.3086773.
Strumenti
Matlab/Simulink, Raisim, CoppeliaSim, C++, ROS, Novint Falcon, Kuka iiwa
Docenti di riferimento
Mario Selvaggio - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.