
Immagini di riferimento
Oggetto della tesi
Lo svolgimento di tesi può riguardare lo sviluppo di uno o più dei seguenti punti:
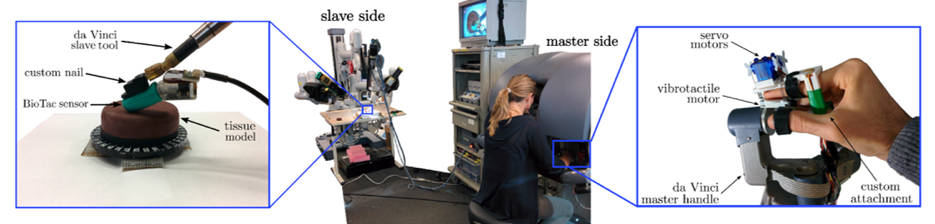
- Implementazione di un algoritmo per il cutaneus haptic feedback utilizzando un dispositivo commerciale lato master e strumenti sensorizzati lato slave, oppure un sensore di forza/coppia ATI, oppure osservatori lato slave per la misura/ricostruzione della forza (su robot Da Vinci o su KUKA MED)
- Realizzazione di un sensore di forza lato slave basato su tecnologia optoelettronica da applicarsi al da Vinci patient side robot, in particolare da applicarsi al trocar
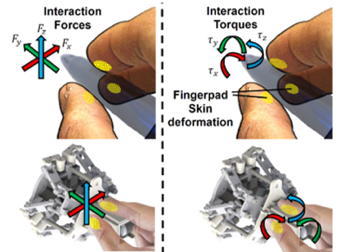
- Realizzazione del dispositivo per il cutaneus feedback proposto da Okamura
- Progettazione meccanica e disegno cad di un dispositivo per il cutaneus feedback miniaturizzato basato su skin stretch e/o su vibrazioni e implementazione di un algoritmo per l’haptic cutaneus feedback utilizzando il dispositivo progettato.
Alcuni punti della tesi saranno svolti in collaborazione con l’Università di Siena sotto la supervisione del Prof. Domenico Prattichizzo, quindi il lavoro prevede lo svolgimento di un periodo presso il SIRSLab. Le spese sono a carico dello studente a meno di un rimborso spese concordato con il gruppo di robotica dell’Università di Siena.
Strumenti
Progettazione meccanica, ottime competenze in disegno cad,programmazione di dispositivi a microcontrollore arduino/mbed, Controllo dei robot, da Vinci Research Kit, KUKA MED
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.