
Immagini di riferimento


Oggetto della tesi
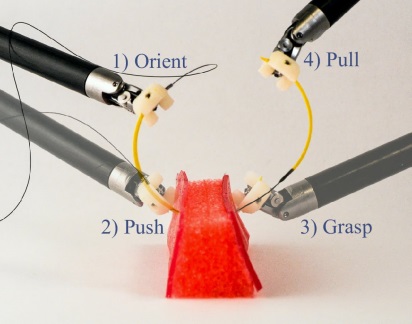
L'obiettivo della tesi è quello di sviluppare strategie di controllo (semi-)autonomo per il taglio e la sutura mediante rilevamento e tracking degli strumenti chirurgici, e tracking della deformazione tissutale.
Lo sviluppo della tesi può riguardare uno dei seguenti punti.
- Rilevazione e tracking degli strumenti chirurgici mediante fusione sensoriale (posizione, visione)
- Trackingdi oggetti/strutture deformabili
- Stima della forza di interazione usando informazioni visuali
Strumenti e software
Da Vinci Research Kit, cameras, stereo endoscope, Open CV, Kalman Filter, ROS, SOFA simulator, Softwares e methodi per l’Image processing
Docente di riferimento
Fanny Ficuciello - fanny (dot) ficuciello (at) unina (dot) it