
Immagini di riferimento
Oggetto della tesi
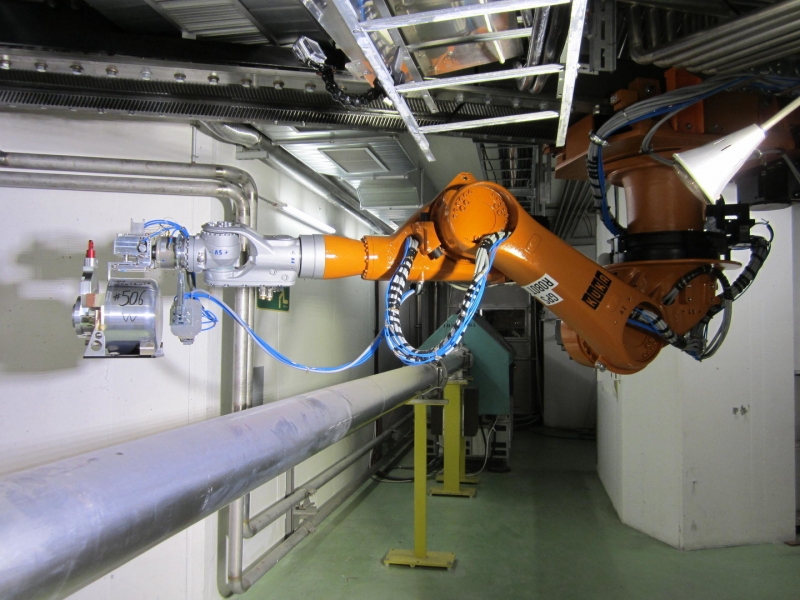
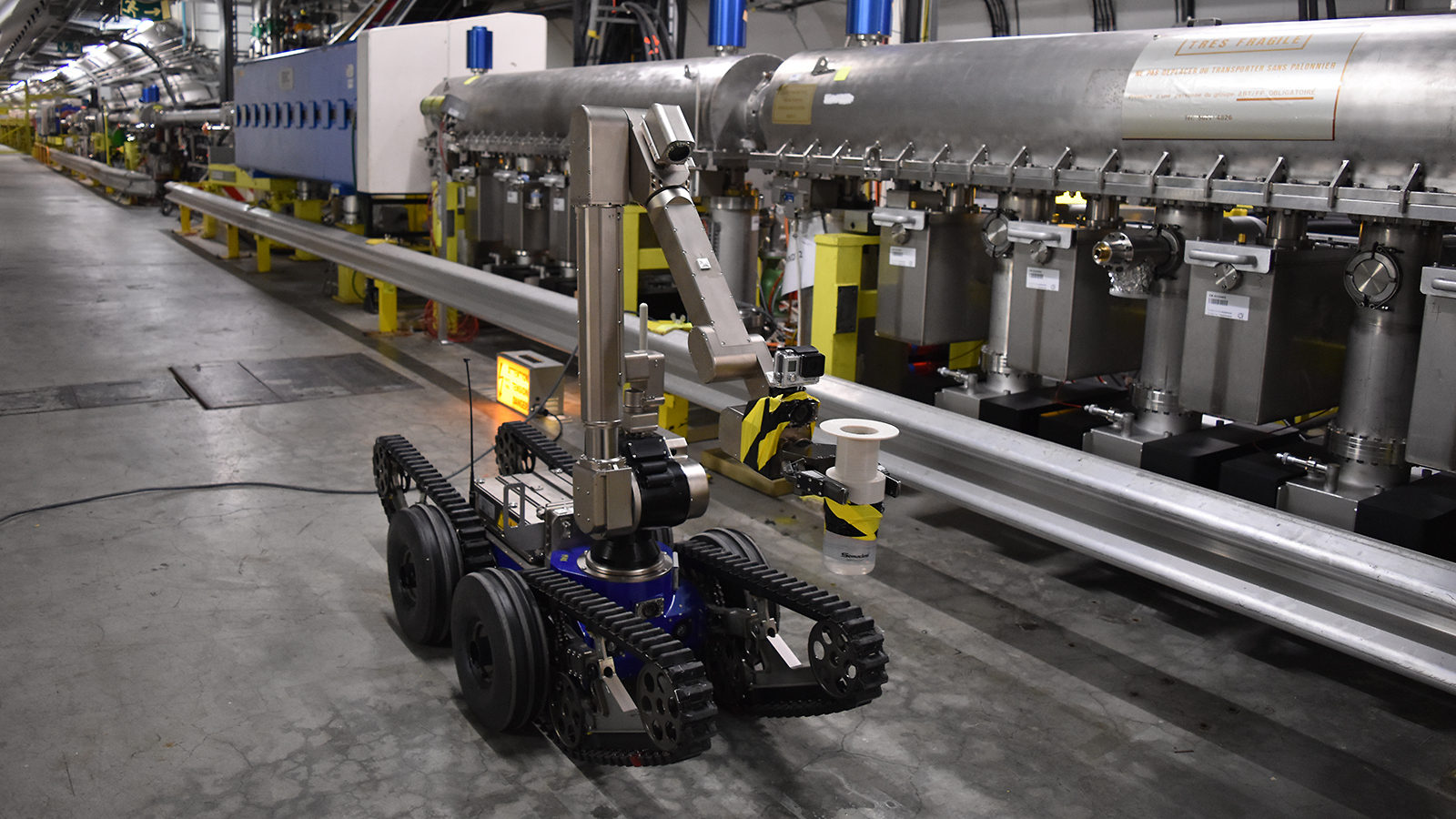
The candidate will develop a system for autonomous approaching of a robotic arm. Using Deep Learning algorithms, the system should be able to recognize the target object and estimate its pose in order to generate the best approaching trajectory. The trajectory has to be safe and has to avoid possible self-collisions and collisions with the environment. Moreover, the trajectories compute by the manipulator are based on trajectories obtained using Learning by Demonstration techniques and the system needs to be as compliant as possible to adapt itself to different real scenarios. The system will also learn from the real scenario applications in order to improve its performance.
Luogo della tesi
La tesi si svolgerà presso il CERN, Svizzera. Il rimborso spese ammonta a 1500CHF/mese.
Docente di riferimento
Vincenzo Lippiello - vincenzo(dot)lippiello(at)unina(dot)it
Footwear