
Immagini di riferimento

Oggetto della tesi
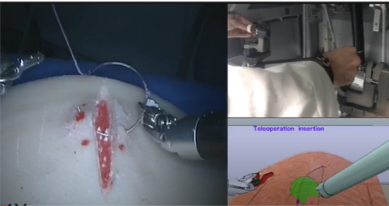
L’obiettivo della tesi è lo sviluppo di algoritmi di sutura automatica. Il lavoro può essere focalizzato su diversi (uno o più) obiettivi e fasi del compito di sutura: grasping dell’ago, pianificazione dei punti della ferita in cui avviene l’inserimento dell’ago, esecuzione del percorso che unisce due punti di chiusura della ferita e infine l’estrazione dell’ago. Per ciascuno di questi subtasks si possono individuare funzioni di costo da minimizzare per il controllo ottimo della sutura. La ricostruzione dell’ambiente e in particolare il tracking delle deformazioni degli organi e dell’ago sono problemi aperti da affrontare utilizzando principalmente la visione. L’informazione di forza misurata o ottenuta mediante osservatori è fondamentale durante l’interazione per minimizzare lo stress ai tessuti. L’apprendimento dall’osservazione del task eseguito dal chirurgo può essere integrato nelle strategie di controllo utilizzando le Dynamic movement primitives (DMPs).
Strumenti
da Vinci, telecamere, endoscopio, Open CV, ROS, C++, DMPs
Docente di riferimento
Fanny Ficuciello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.