
Immagini di riferimento

Oggetto della tesi
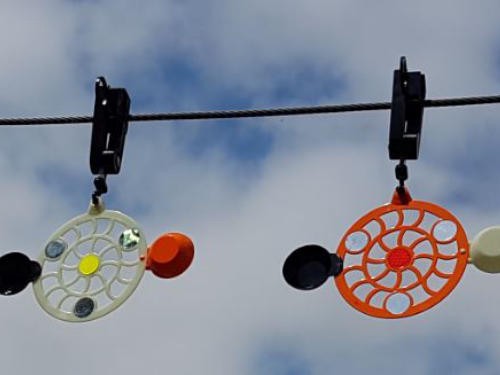
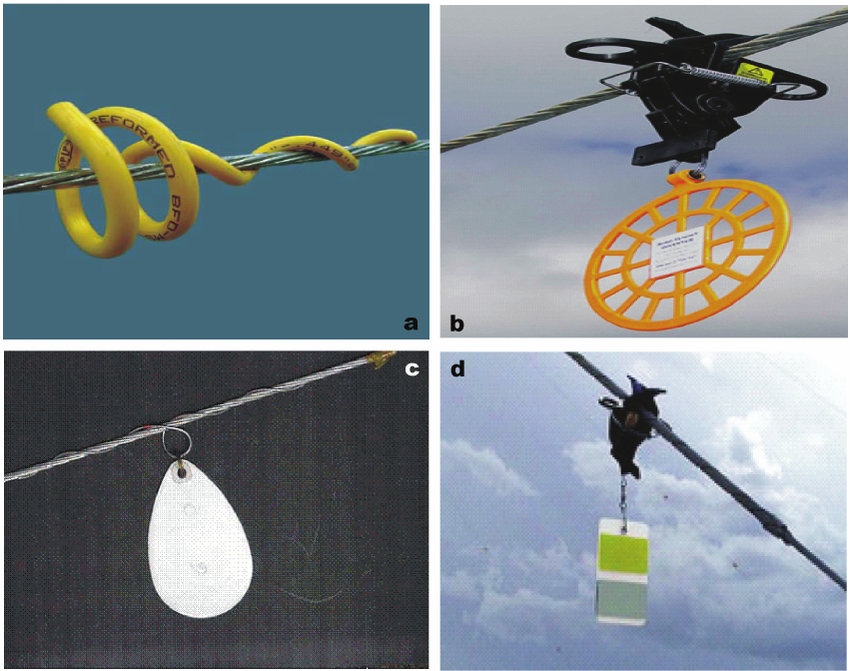
Il lavoro di tesi consiste nell’implementazione e nella sperimentazione di tecniche di pianificazione e controllo per l’installazione di “bird diverter” sulle linee elettriche. L’installazione dovrà avvenire in maniera autonoma con un drone dotato di un’asta sensorizzata che individuerà il cavo tramite un sensore di visione. Lo schema di controllo potrà integrare aspetti del controllo in forza e tecniche di object detection e visual servoing e verrà validato dapprima tramite simulazioni in Matlab/Simulink/ROS-Gazebo e successivamente con esperimenti in arena di volo sfruttando un setup già presente.
Strumenti
C++, ROS, Gazebo, Flying arena , PX4 Autopilot, Pixhawk, Matlab/Simulink, RealSense, OpenCv, ViSP
Docenti di riferimento
Vincenzo Lippiello - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.