
Immagini di riferimento


Oggetto della tesi
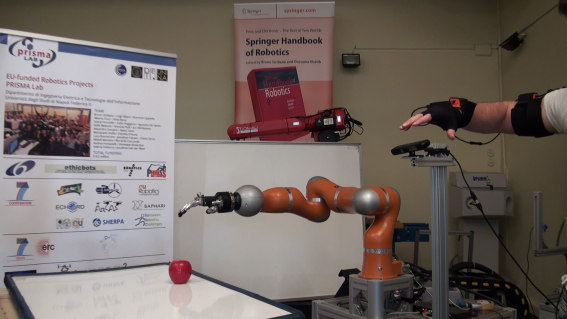
Il lavoro di tesi prevede l’ osservazione delle prese di oggetti e compiti di manipolazione eseguiti dall’uomo e l’estrazione di features per l’apprendimento e il controllo. Strumenti di motion capture, come la tuta Xsense e Kinect camera, verranno utilizzati per misurare il moto durante i compiti eseguiti dall’uomo. È necessario l’utilizzo di un sensore di visione di alto livello per riconoscimento oggetto e tecniche di learning.
Strumenti e software
SCHUNK Hand, KINECT, KUKA LWR, Machine learning, Open CV, Xsense Motion Capture System
Docente di riferimento
Bruno Siciliano - bruno(dot)siciliano(at)unina(dot)it
Air Jordan X 10 Shoes