
Immagini di riferimento


Oggetto della tesi
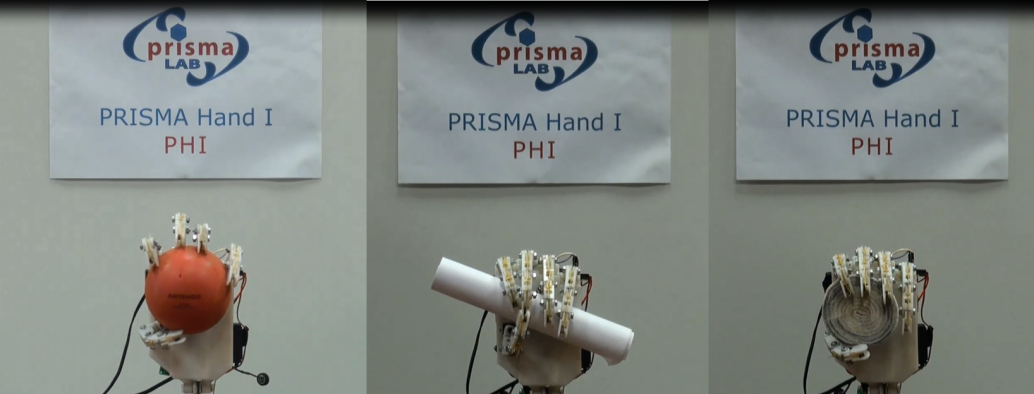
Il lavoro di tesi prevede lo sviluppo e l’implementazione di un controllo basato su segnali elettromiografici di una mano artificiale sottoattuata, la PRISMA Hand I, che utilizza due motori e un sensore di corrente per regolare la stretta. Lo studio prevede l’interfacciamento del bracciale Myo, dispositivo che legge l'attività elettrica dei muscoli, con la scheda di controllo arduino utilizzata per controllare i due motori della mano. Verrà effettuato uno studio di associazione dei segnali elettromiografici alle capacità motorie dell’essere umano per interfacciare i segnali misurati a diverse combinazioni di posizione dei motori della mano artificiale, al fine di consentire la presa di diversi tipi di oggetti con diverse intensità di chiusura.
Strumenti e software
Arduino, Stampante 3D, Software CAD, Myo armband, Sensori elettromiografici (EMG), Conoscenze di Meccatronica
Docente di riferimento
Bruno Siciliano - bruno(dot)siciliano(at)unina(dot)it
Nike Zoom Shift Shoe