
Immagini di riferimento

Oggetto della tesi
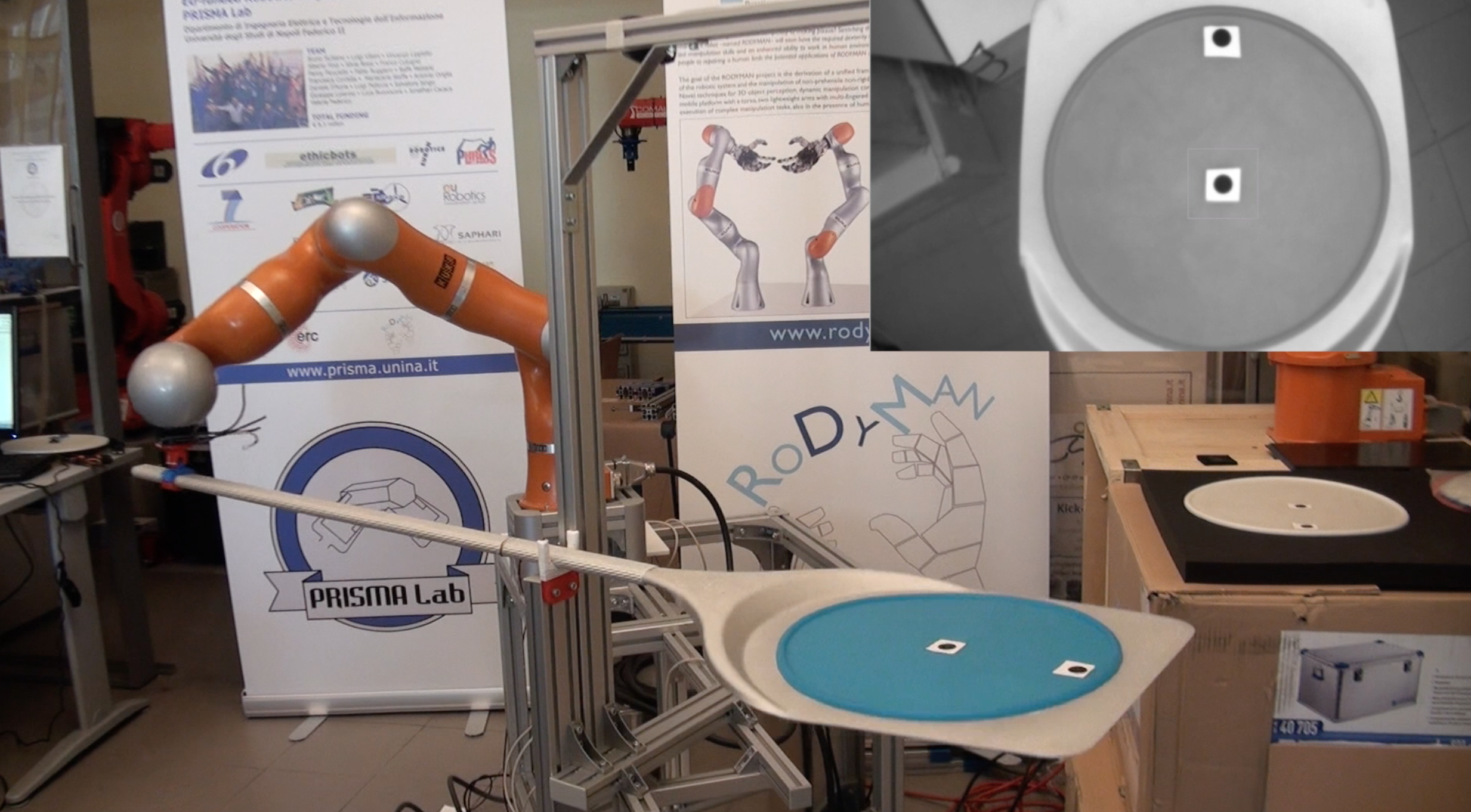
L'obiettivo del lavoro di tesi è replicare un compito di manipolazione dinamica non prensile tramite un robot manipolare. Dapprima il compito verrà modellato ed analizzato in ambiente Matlab/Simulink. L'eventuale simulazione grafica potrà anche avvenire tramite l'uso di simulatore V-rep. Il sistema verrà quindi controllato per stabilizzare punto di equilibrio instabili, oppure inseguire determinati path o svolgere compiti pianificati a più alto livello. Per concludere, il sistema verrà implementato praticamente tramite i robot e set-up già disponibili presso il PRISMA Lab oppure, nel caso, costruendo un set-up dedicato.
Esempi:
- Spinta di oggetti attraverso un robot mobile
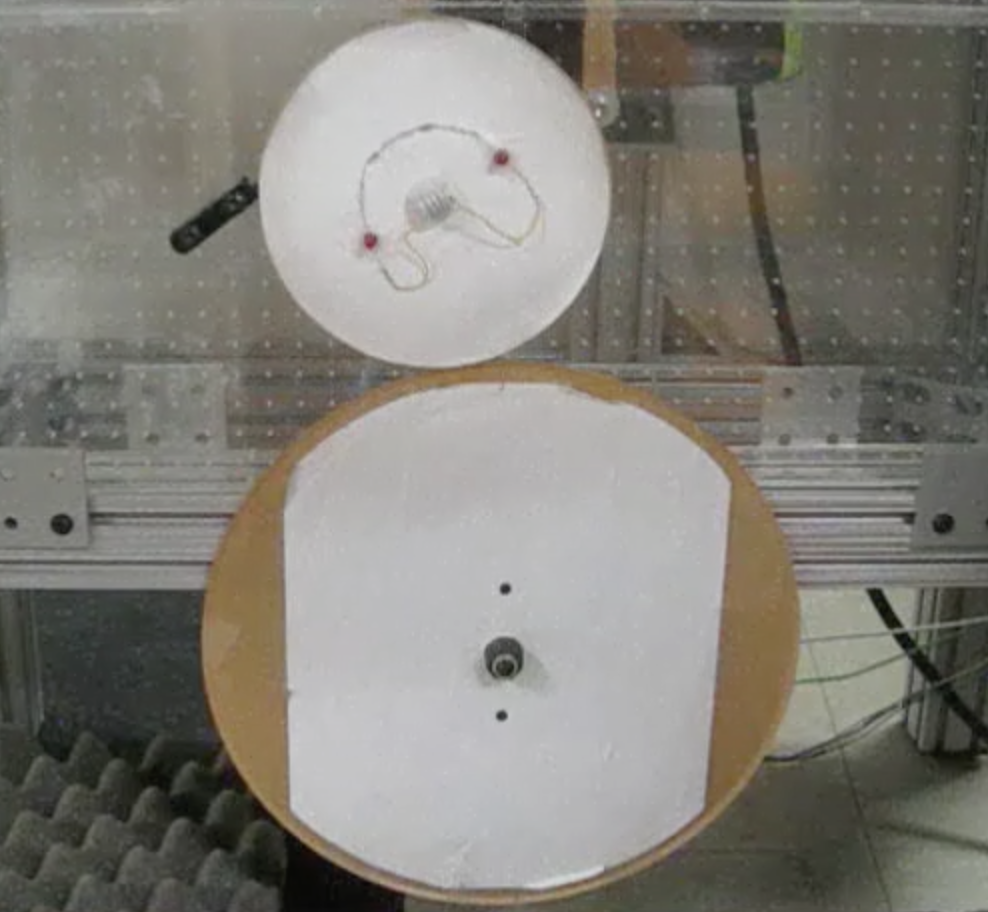
- Controllo passivo del sistema di manipolazione non prensile: disco su disco eccentrico e non omogeneo
- Tecniche di pianificazione per il controllo di orientamento su di una sfera libera di rotolare su di un piano
Strumenti
Matlab/Simulink, v-rep, C++, ROS, Kuka iiwa, Schunk arm, piattaforma RoDyMan
Docente di riferimento
Fabio Ruggiero - Questo indirizzo email è protetto dagli spambots. E' necessario abilitare JavaScript per vederlo.